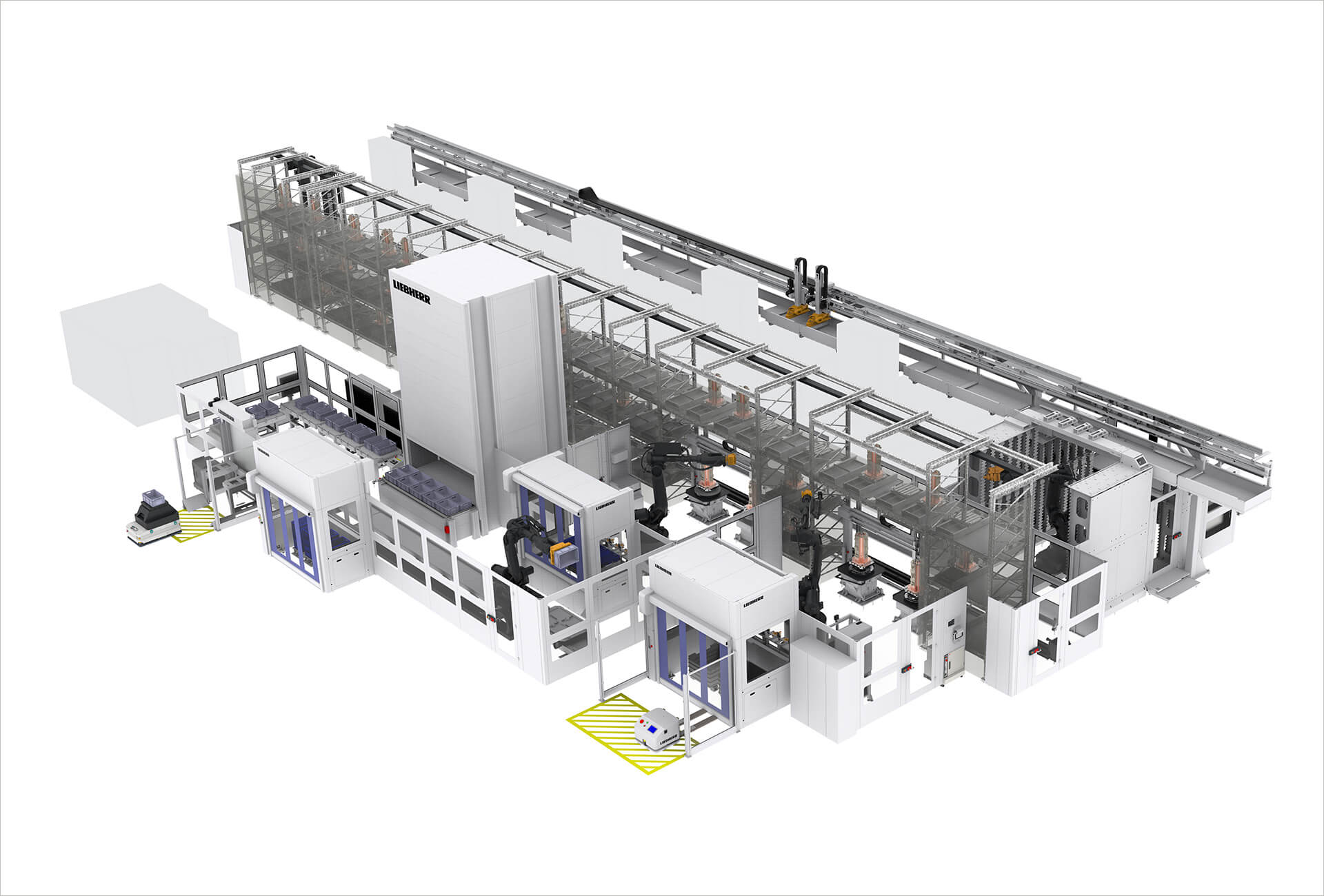
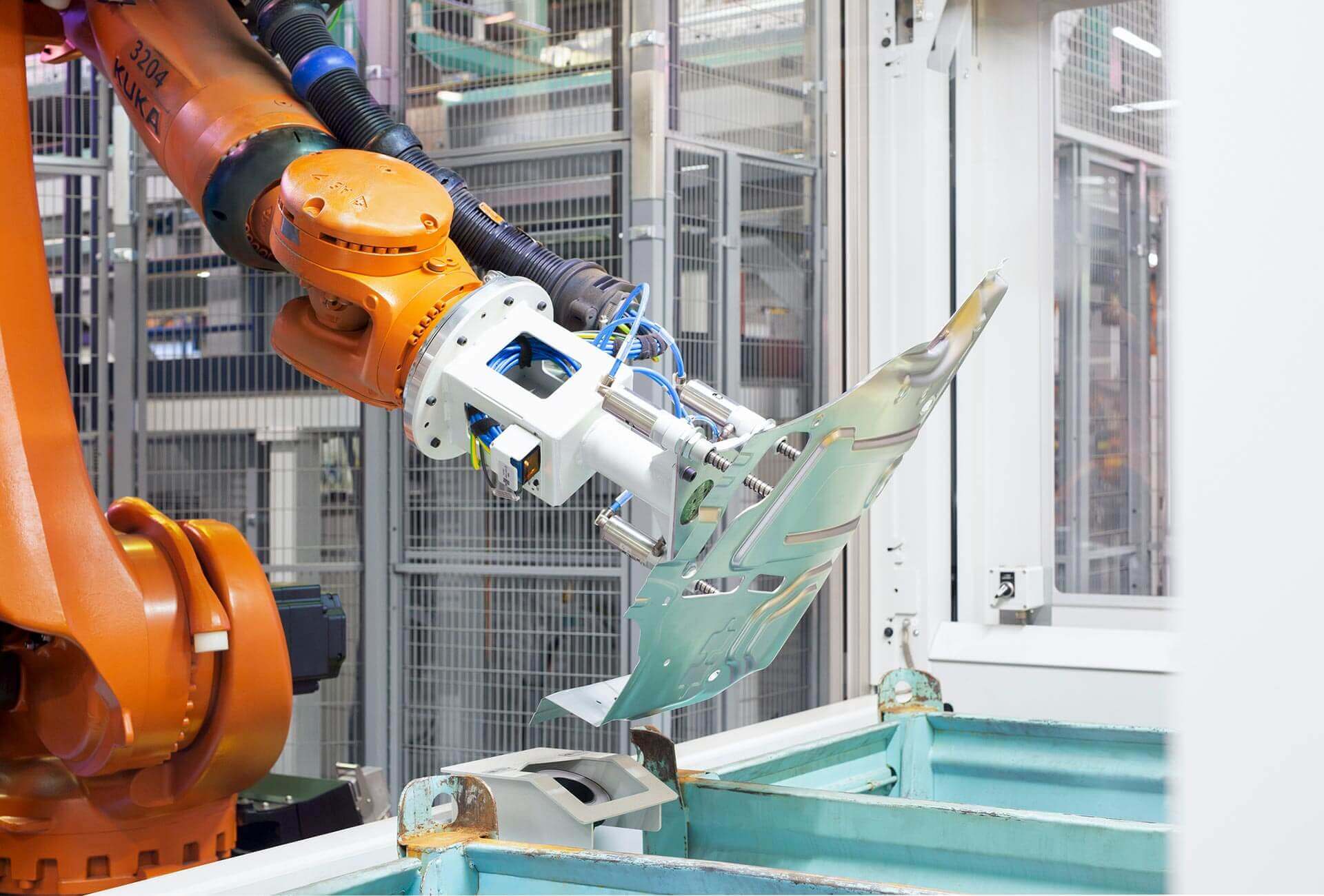




Alimentation automatisée de pièces de carrosserie
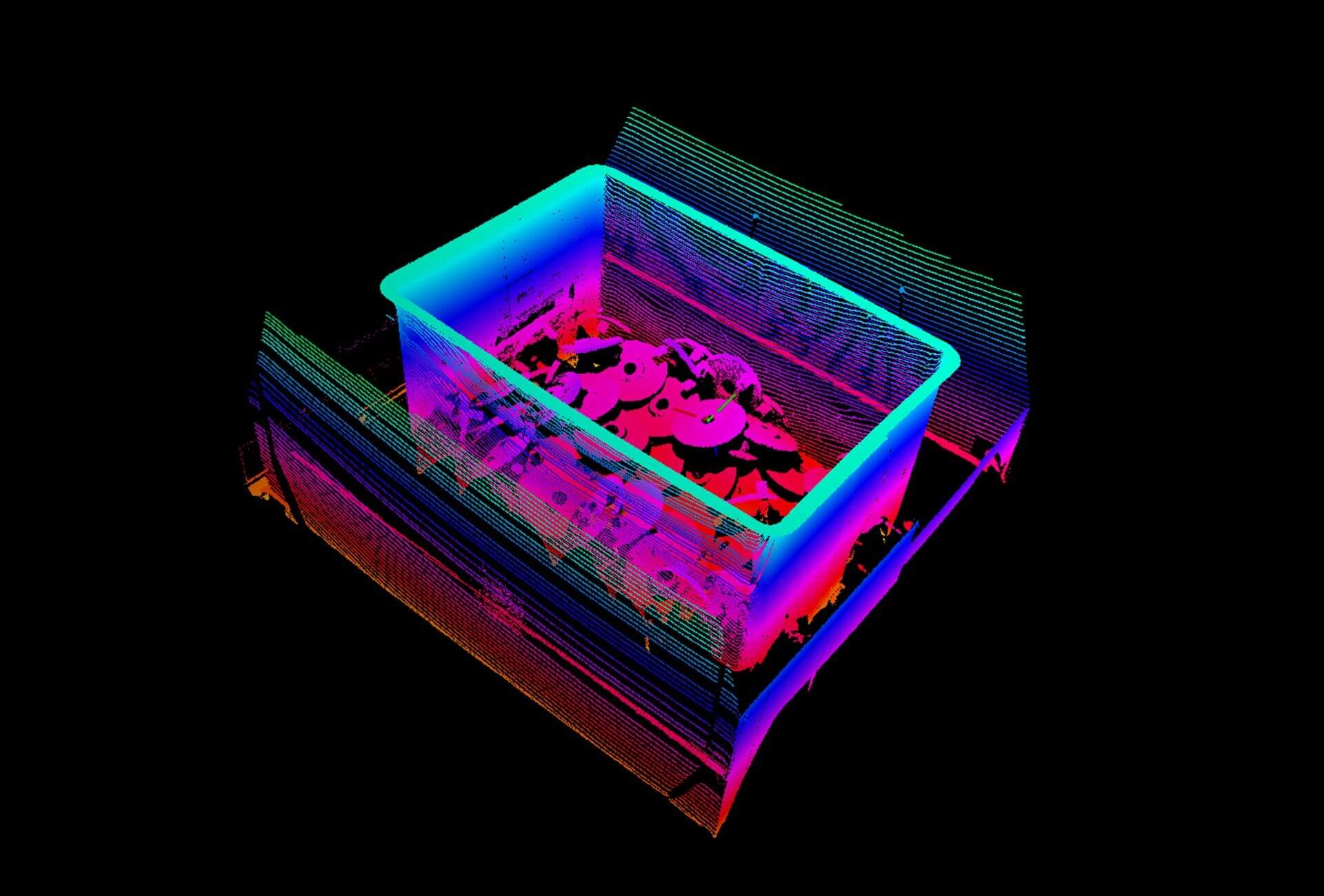
Les tôles constituant les ailes de carrosserie de voitures sont transportées dans des containeurs sur roues qui sont amenés dans le module d’alimentation de la cellule. Là, le système de vision 3D positionné en hauteur, scanne d’abord la position du containeur puis la position exacte de la tôle dans le containeur. Sur la base de ce scan, le robot prélève dans la caisse la tôle à l’aide d’un préhenseur équipé de trois ventouses flexibles et la présente devant une caméra 2D. Celle-ci contrôle la position de la tôle et reconnait si deux tôles ont été prises en même temps.
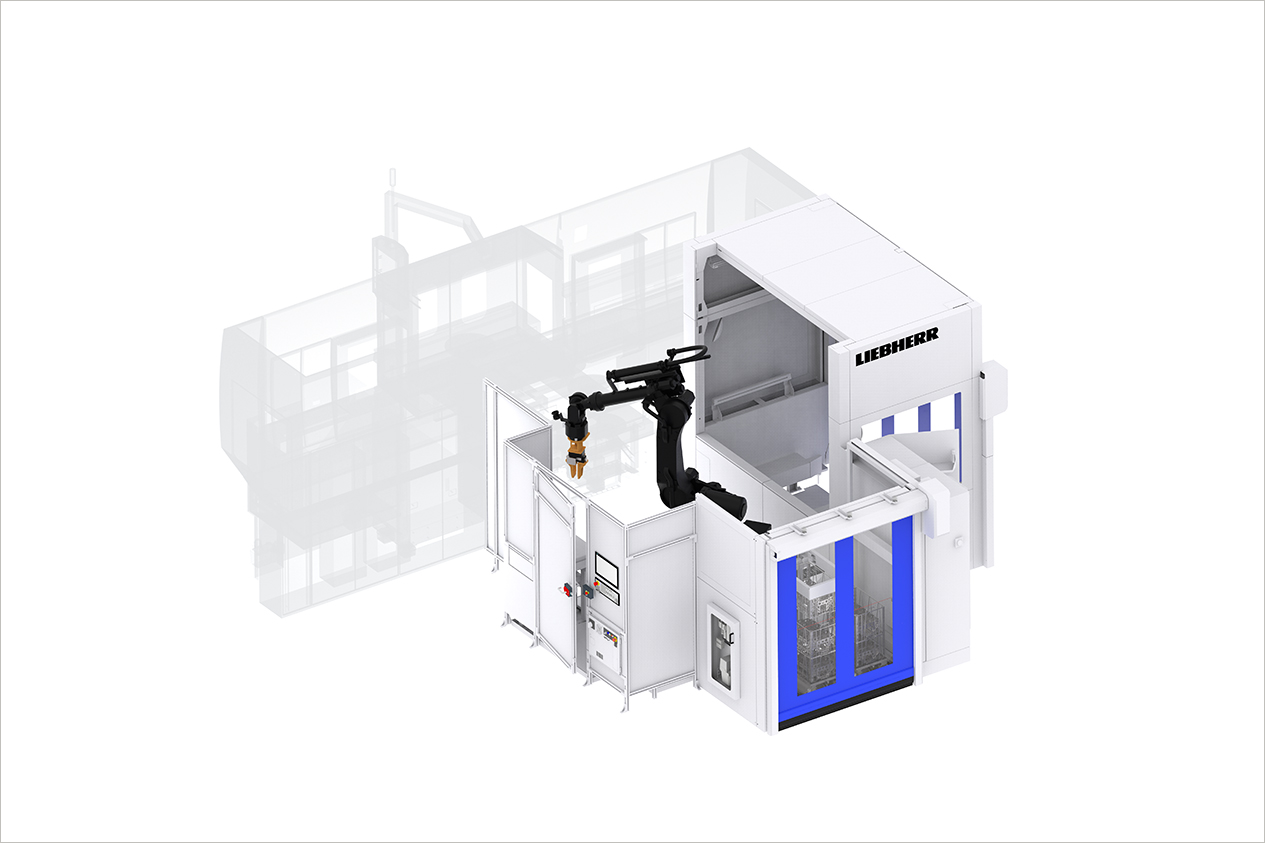
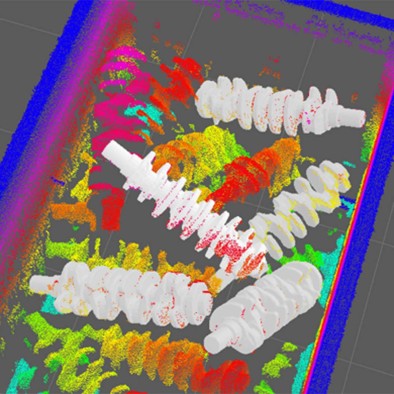
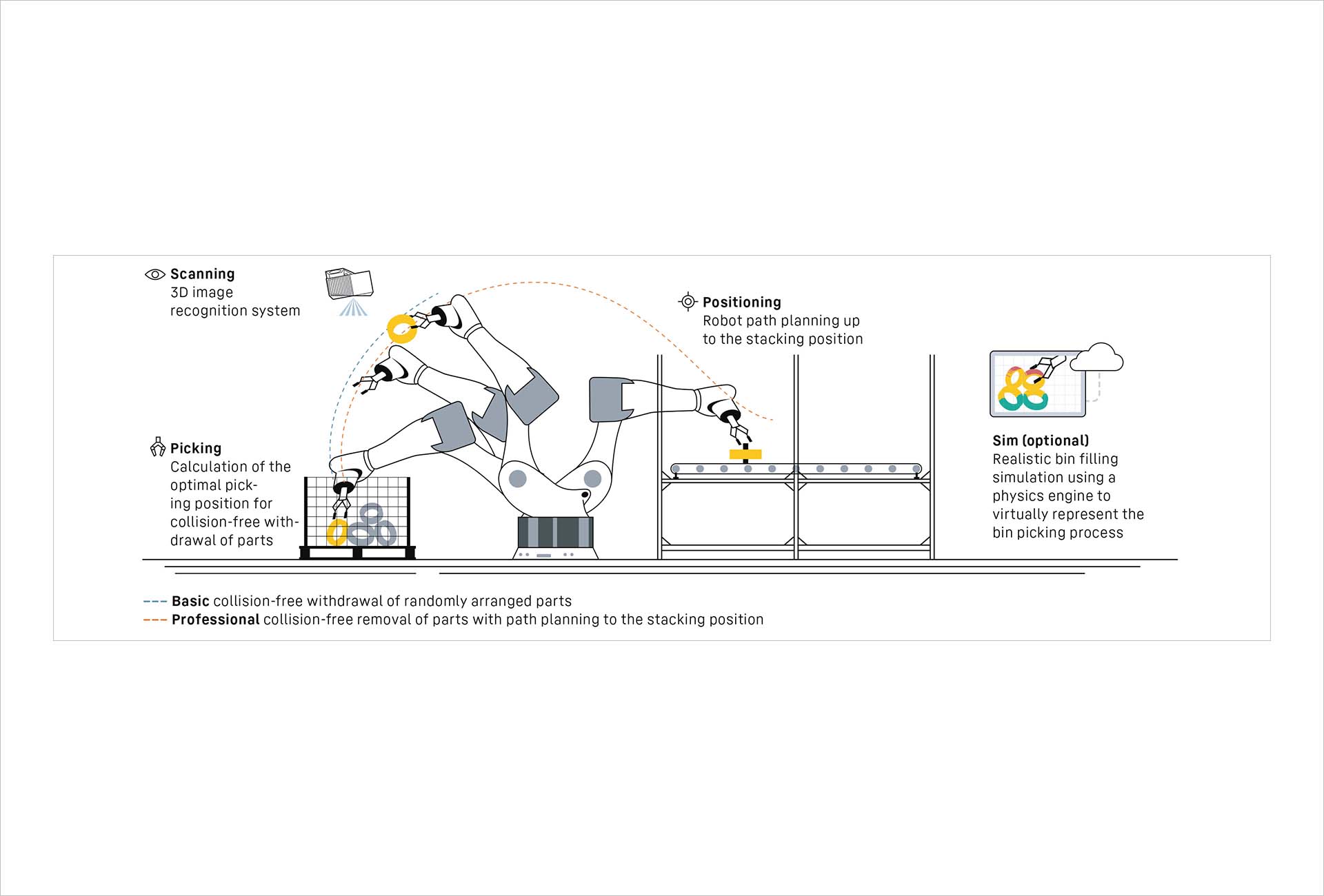
Chargement de tours et rangement dans des paniers métalliques
Un chariot élévateur dépose des caisses contenant des pignons bruts en vrac dans le module d’alimentation de la cellule. Une caméra scan le vrac, puis les pièces sont séparées à l’aide d’un préhenseur magnétique et posées sur une station d’orientation. Le robot change de préhenseur pour un préhenseur parallèle et récupère la pièce, la réoriente et la place dans le tour pour l’usinage. Après l’opération d’usinage la pièce est déposée dans un panier métallique situé dans la cellule d’empilage. Une fois les paniers remplis ils peuvent être récupérés par l’opérateur.
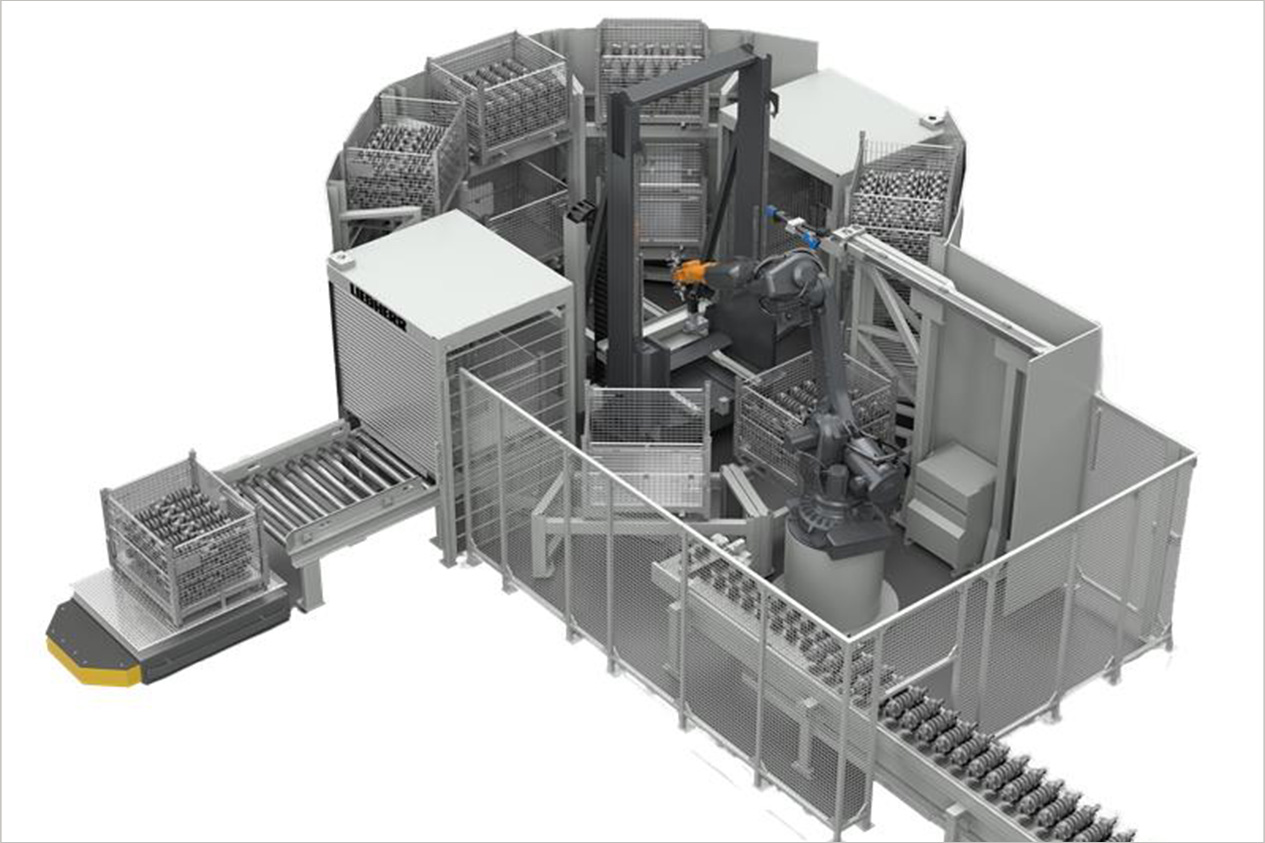
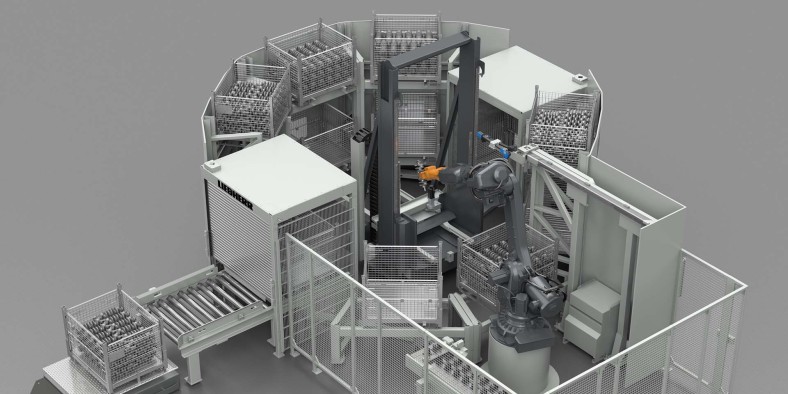
Îlot de chargement d’une ligne d’usinage de vilebrequins, avec stock tampon
L’extrême flexibilité de la cellule de chargement de la ligne d’usinage a été obtenue en associant le système de chargement rotatif RLS conçu par Liebherr à l’application de dévracage. Les vilebrequins bruts sont disposés en vrac dans des caisses grillagées et acheminés jusqu’à l’entrée de la cellule par AGV. La taille des lots ainsi que la diversité des pièces sont gérés par le superviseur de ligne du client.