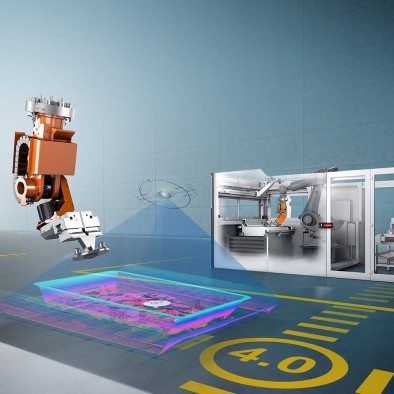
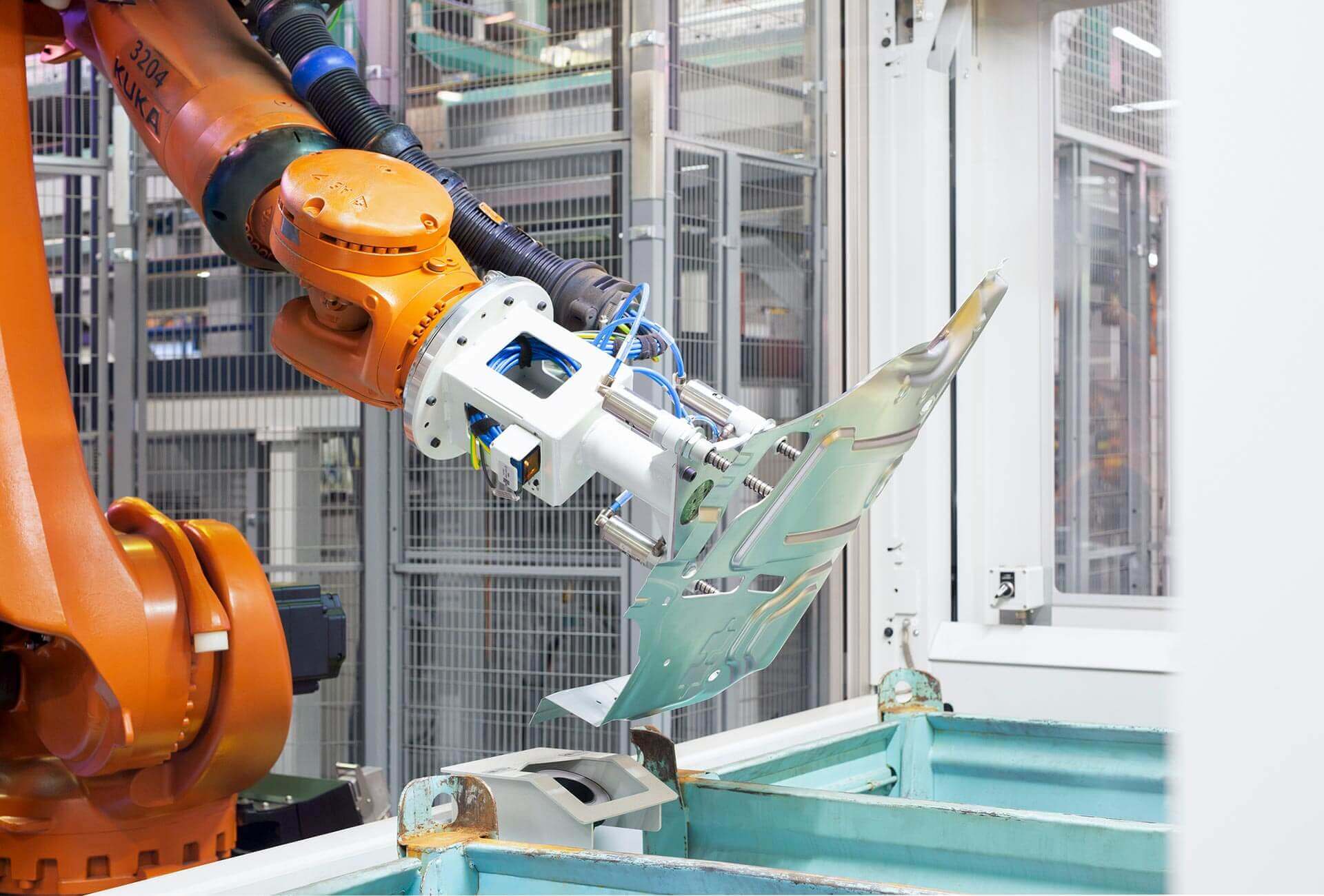




Alimentación automatizada de chapas de carrocería
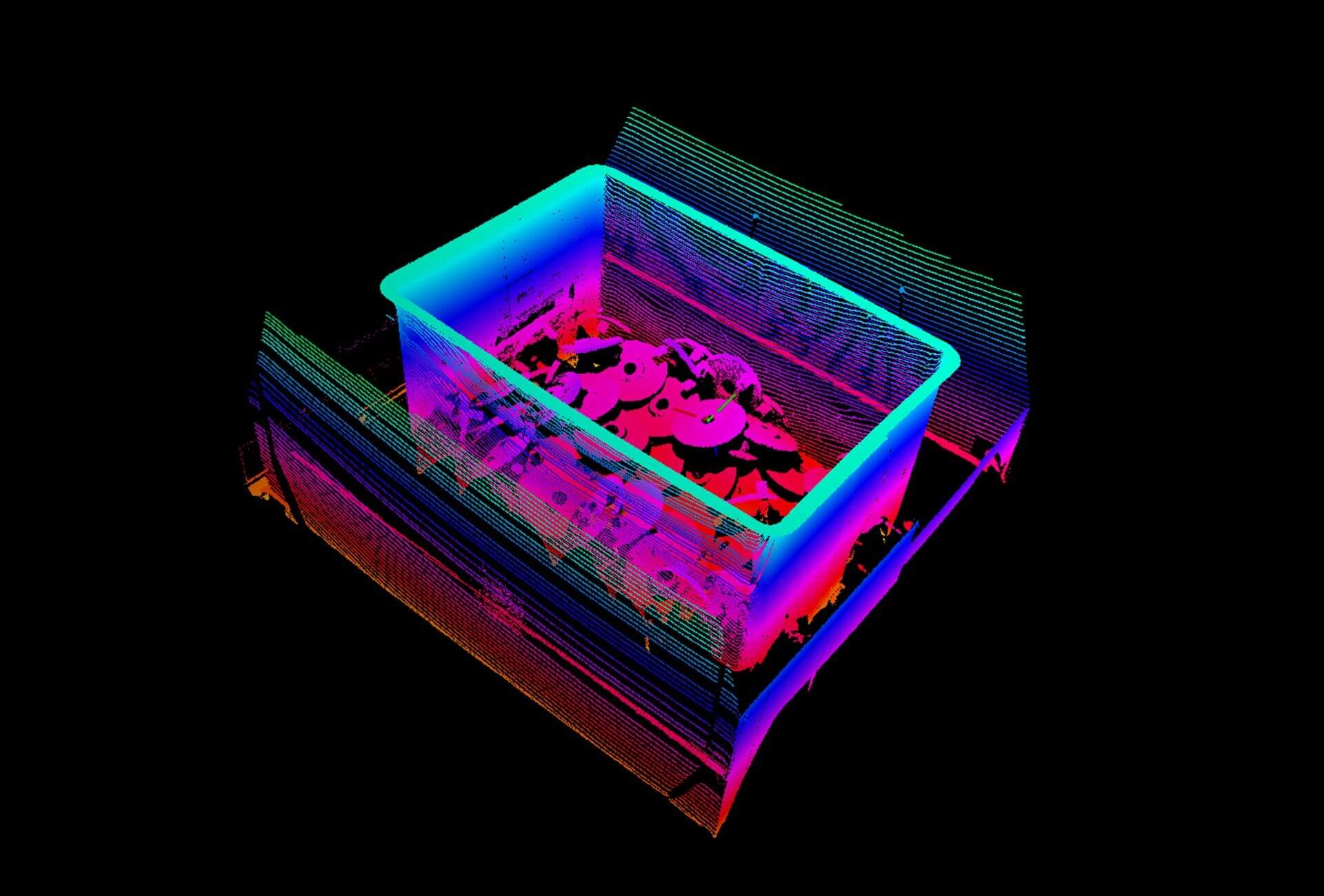
Las chapas para el bastidor lateral de un automóvil son transportadas en cajas grandes de metal con un tren logístico hasta el módulo de alimentación. Allí, el sistema de visión de 3D escanea primero desde arriba la posición de la caja, así como la posición exacta de las chapas de la carrocería en la caja. A partir de estos escaneados, el robot retira la chapa de la caja con una ventosa flexible de tres puntos y la dirige a una cámara de 2D. Esta controla la posición de los componentes y detecta si se han recogido dos componentes al mismo tiempo.
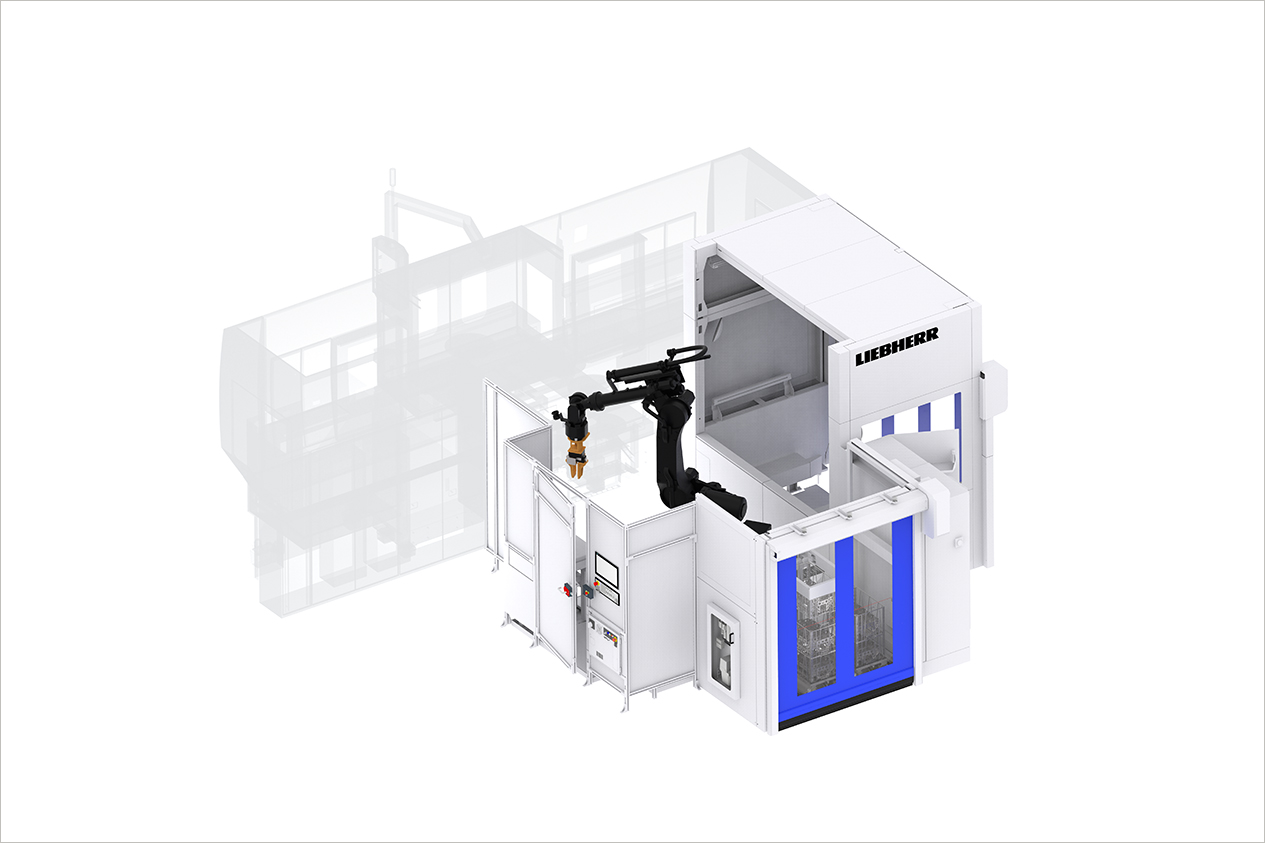
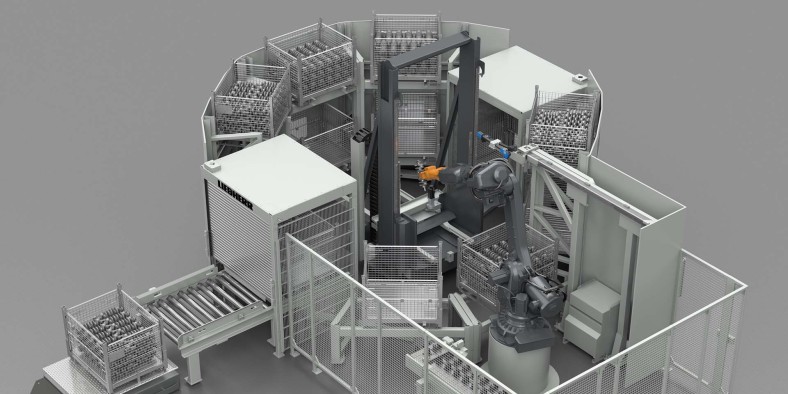
Carga de tornos y separación en cestas de malla
Las ruedas dentadas en bruto se descargan en el módulo de alimentación con la carretilla elevadora. Una vez que la cámara escanea el material vertido, las piezas se separan con una pinza magnética y se colocan sobre un puesto de orientación. A continuación, el robot cambia a una pinza paralela para recoger la pieza, orientarla de nuevo y entregarla en el torno para su mecanizado. Tras el mecanizado, las piezas se cargan en las cestas de malla de una célula de apilado y las pilas de cestas llenas pueden ser retiradas por el usuario.
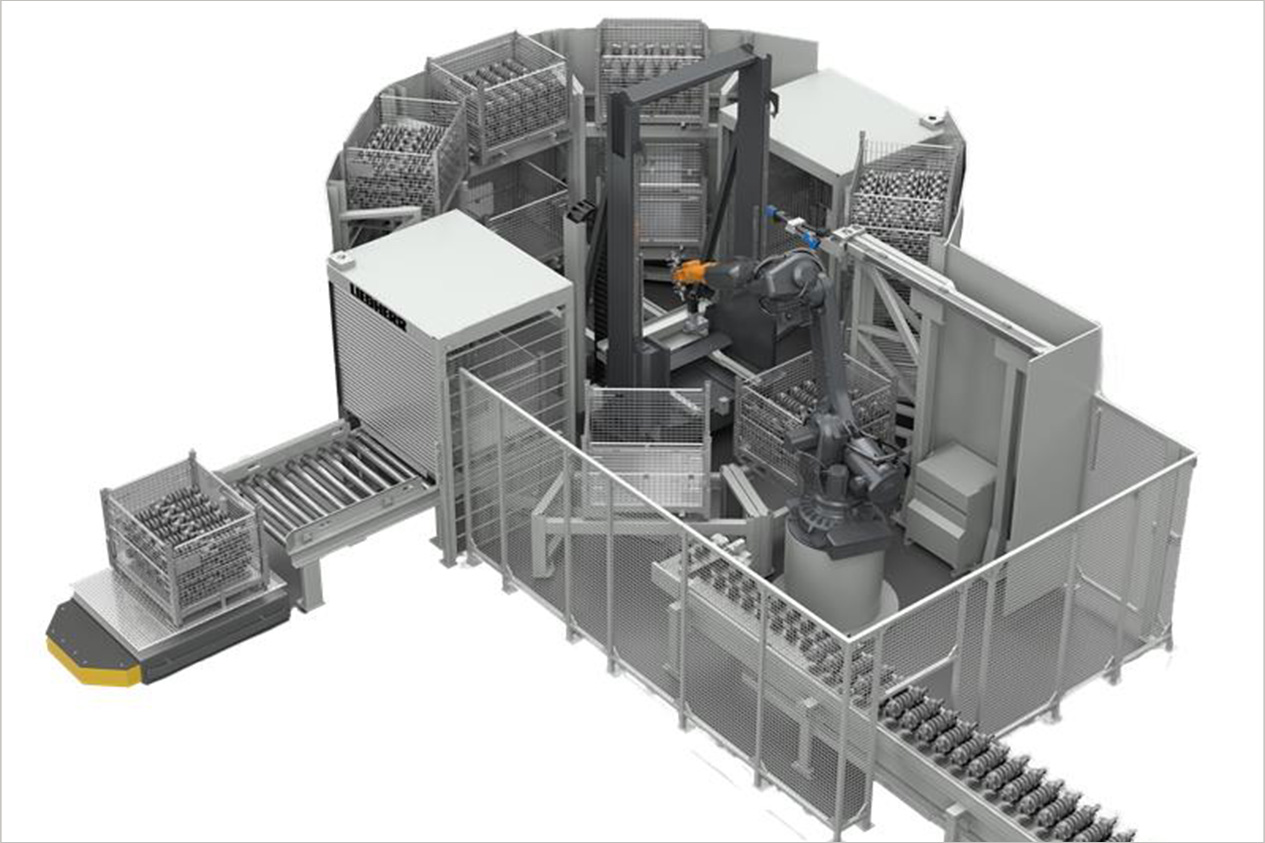
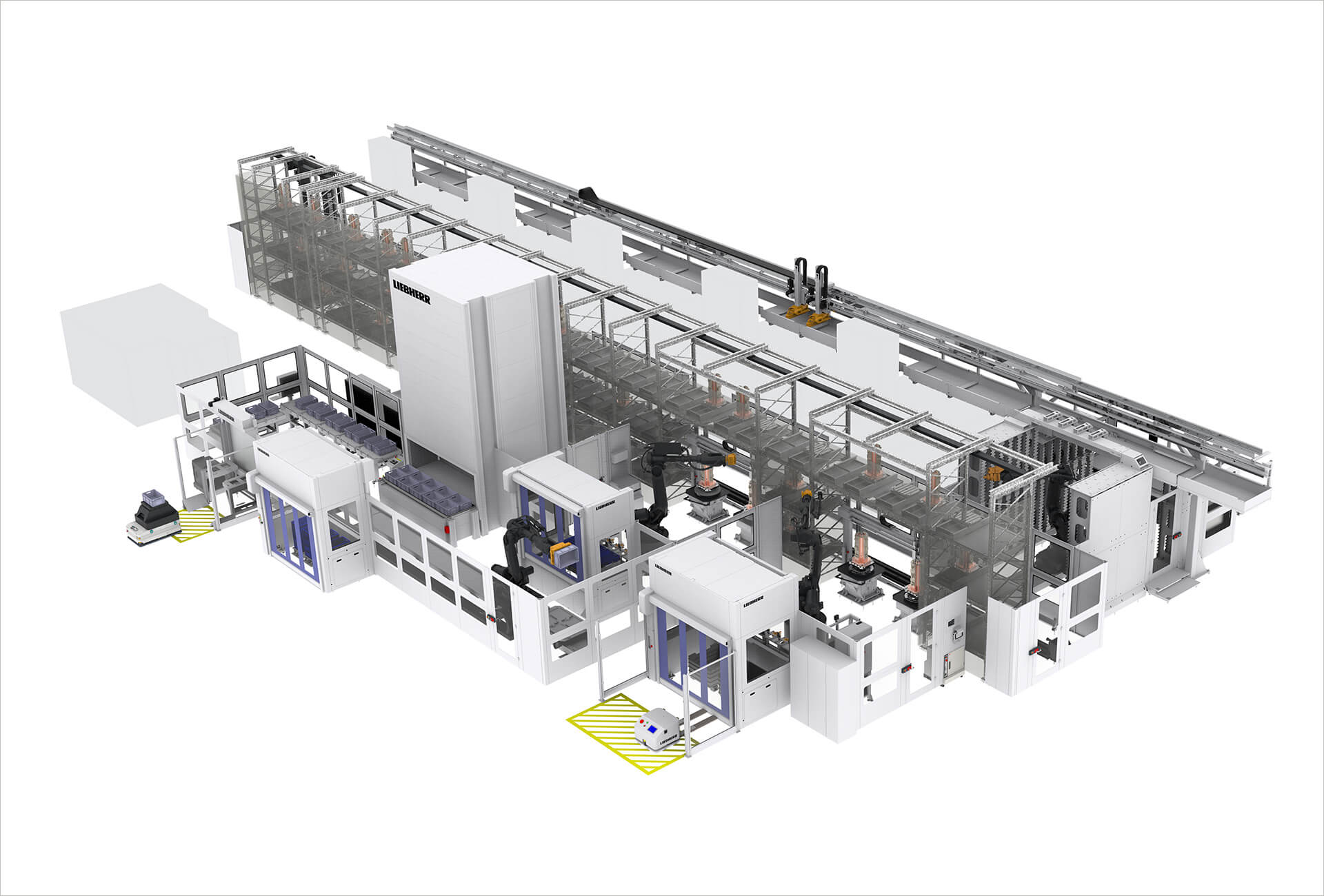
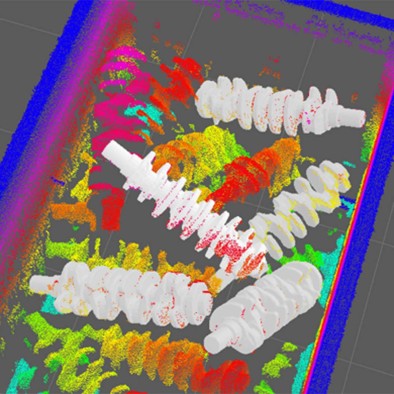
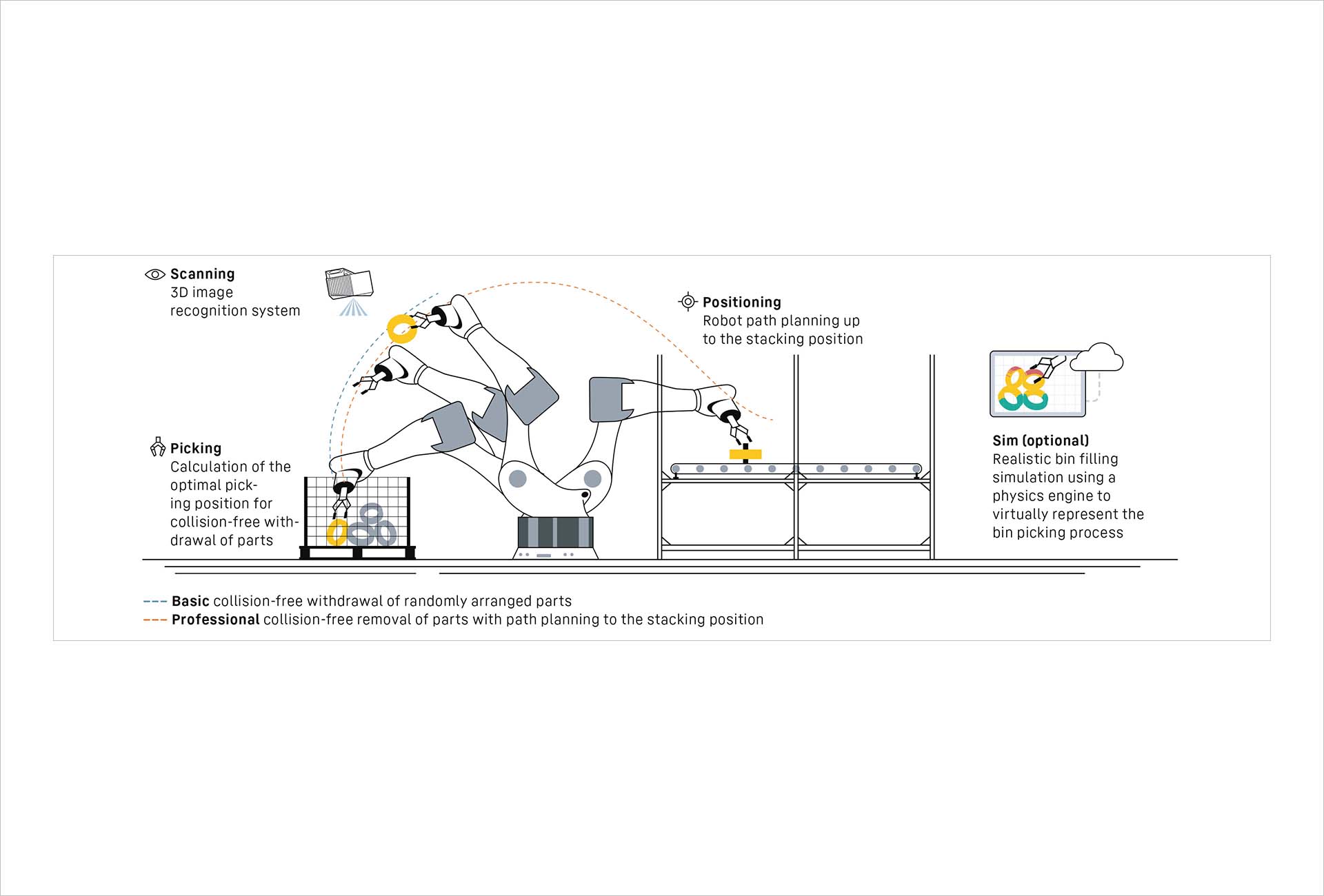
Entrada de línea con almacenamiento intermedio para cigüeñales
La combinación de sistemas de carga rotatoria RLS de Liebherr y la aplicación de bin picking ha hecho posible una entrada de línea de gran flexibilidad. Los cigüeñales en bruto se amontonan sin orden en cajas de rejilla y se envían a la entrada de línea con un sistema de transporte sin conductor AGV. El ordenador central del cliente controla la cantidad de piezas definida de los diferentes tipos de componentes