工艺包
注重细节
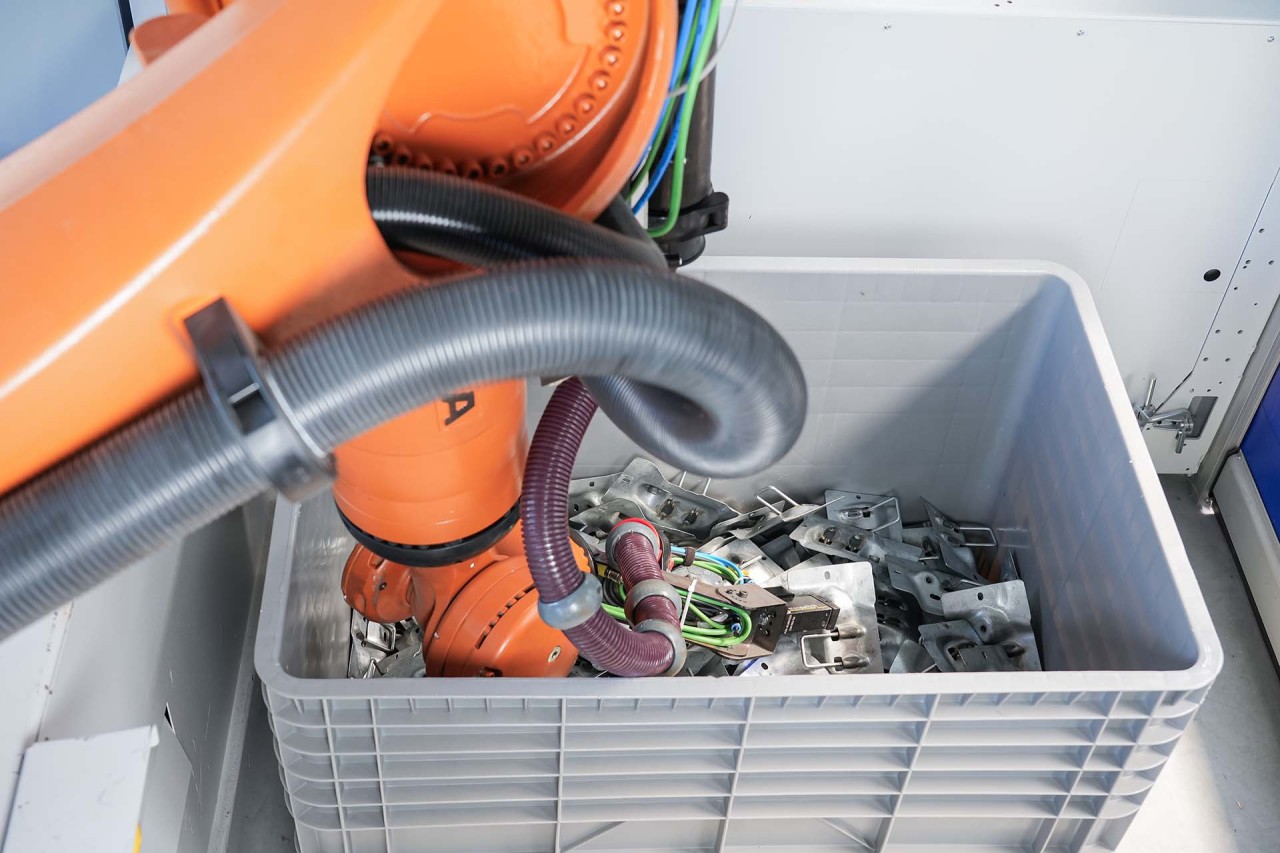
该工艺包包括用于容器内随机取物的 LHRobotics.Vision 软件,可实现精确的物体识别和选择以及无碰撞零件移除。并且,该软件还可以接管机械手路径规划直至存储点。此外,该应用还需要基于投影仪的视觉系统。
LHRobotics.Vision 软件的主要特点
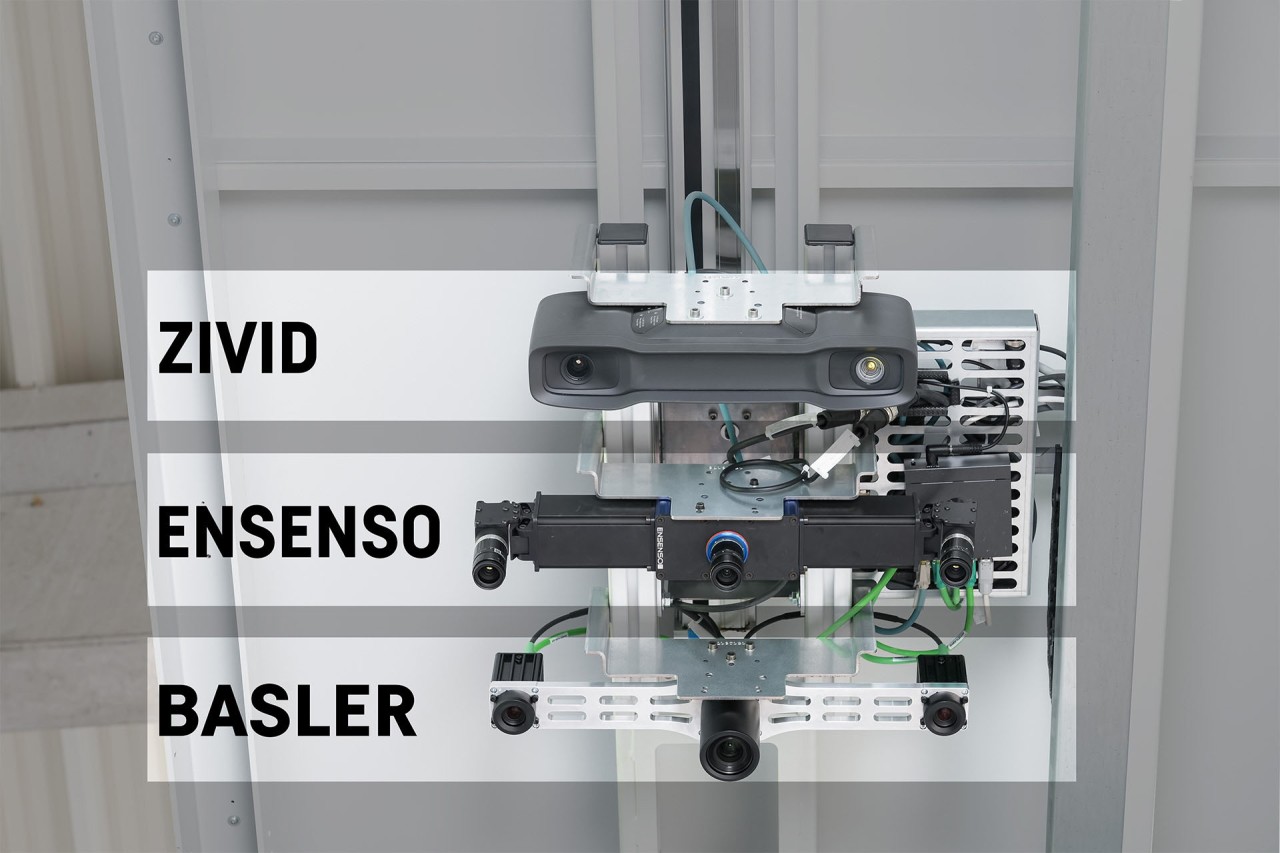
3D 相机集成与制造商无关

关于容器内随机取物的可靠专业知识和 3D 视觉解决方案
01/02

广泛的机械手支持
直观的容器内随机取物操作界面,从设置到批量生产的过程速度加快
01/02
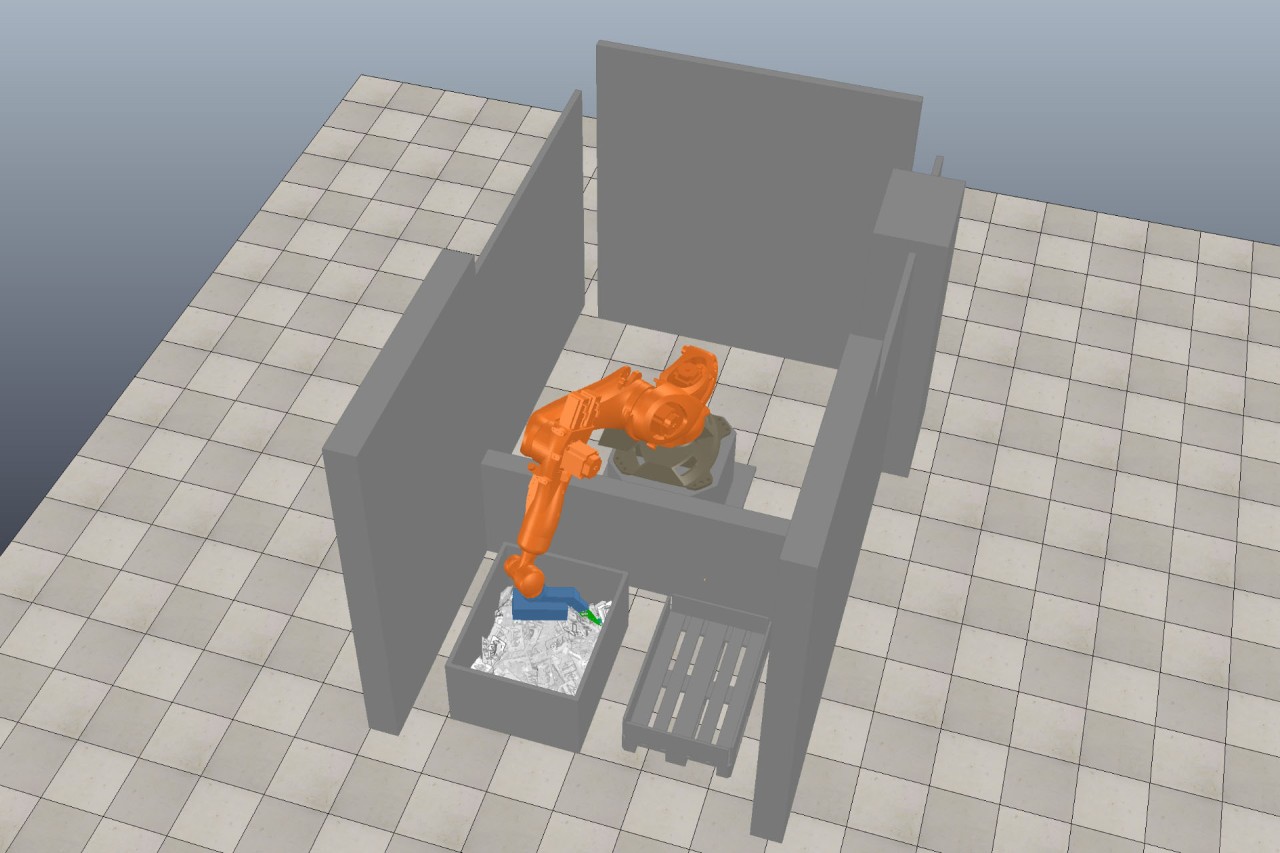
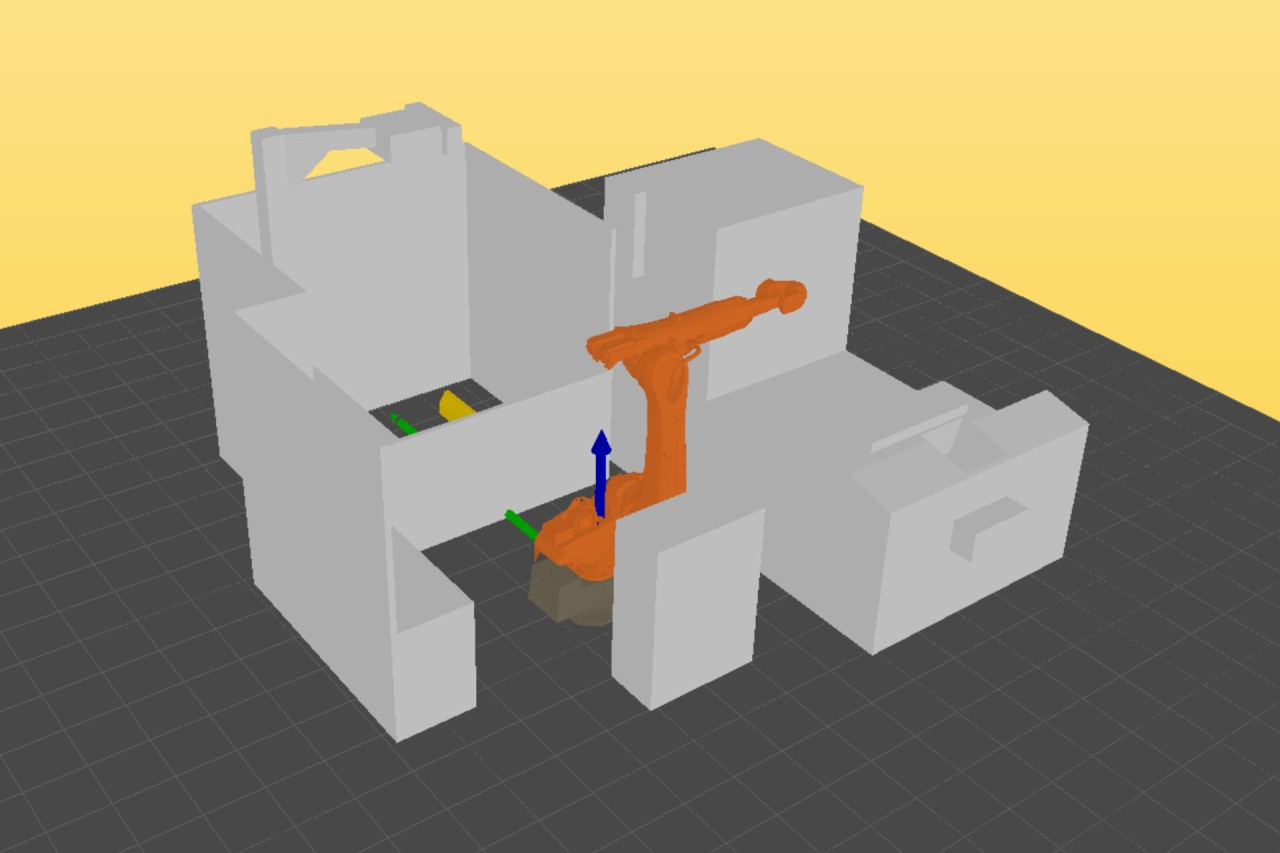
模拟 -
降低风险,完善流程
01/02

图层重叠功能:在零件紧密堆放的情况下依旧能稳妥抓取
人工智能 (KI) 为黑暗带来光明
自版本 3.4 起,人工智能会自动优化识别参数。
操作人员只需一次性确定工件在点云中的位置——之后软件会进行多次自动扫描,并自主确定最佳设置。
结果:更稳定、更强大且可重复识别,无需手动微调。
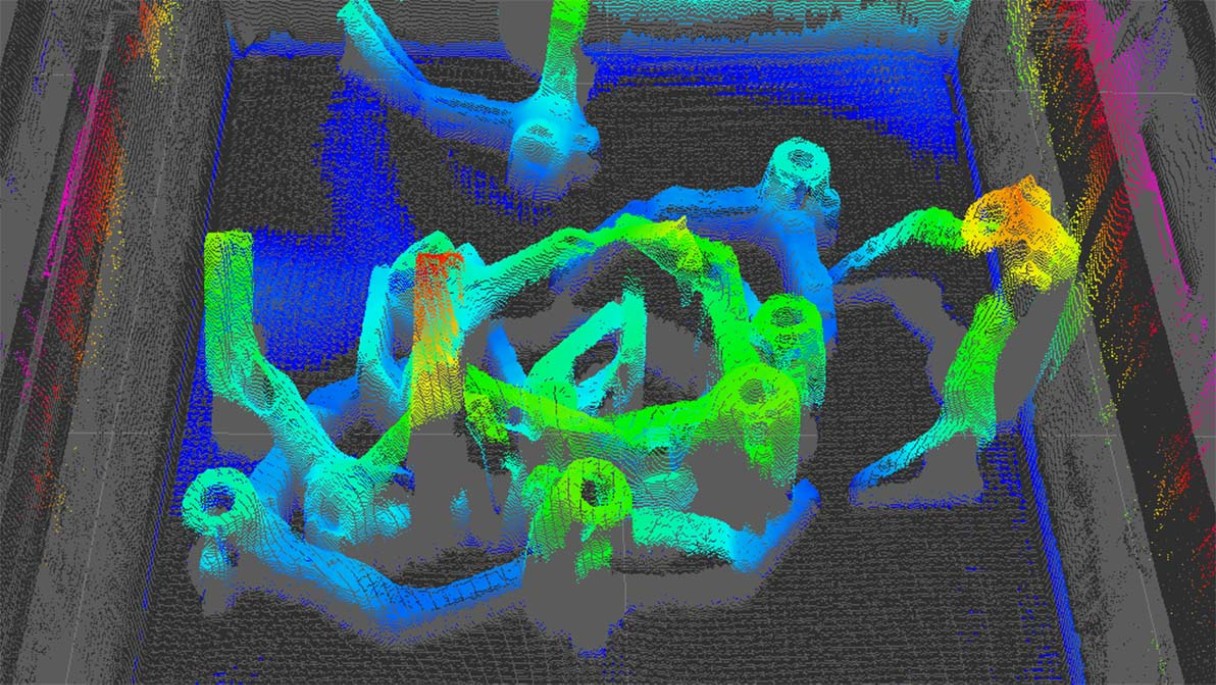
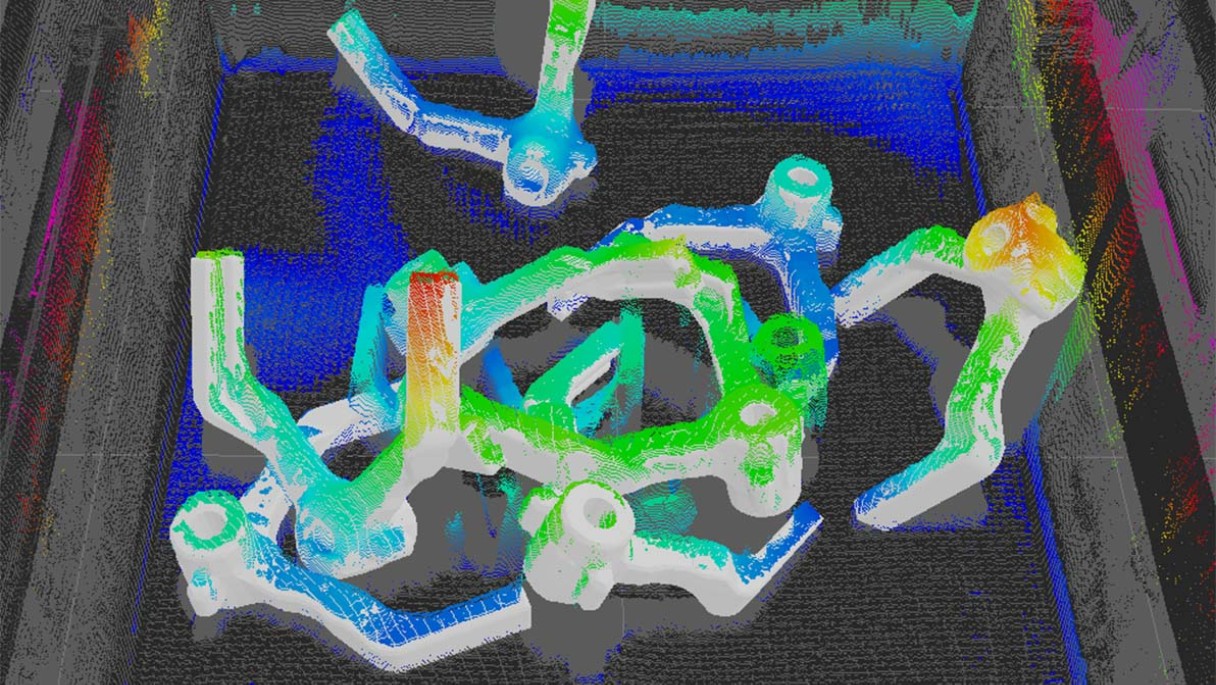
人工智能分割
只关注重要信息
我们处理每台相机的原始数据,并使用我们的滤镜和人工智能分割对其进行优化。
由此,我们加快了零件匹配,并获得最佳且最快的结果

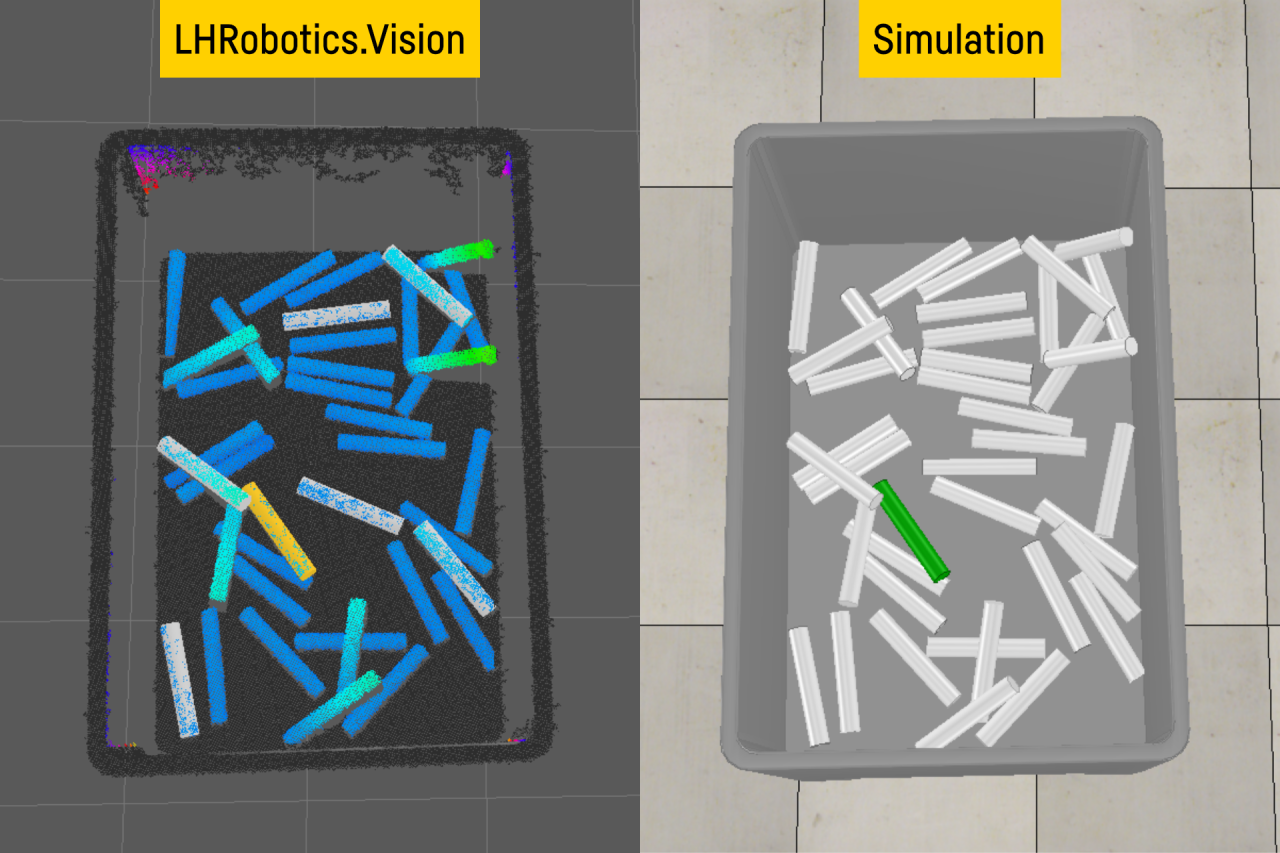
实际情况

点云
分割点云
应用场景
我们的许可模式
DETECT
精确 3D 识别,不受相机制造商限制,为实际应用设计。
DETECT 提供用于可靠工件 3D 识别的所有核心功能,无论相机制造商是哪家公司,从而为所有其他许可级别奠定基础。
- 点云中工件的 3D 匹配——与所有常见的 3D 相机系统兼容
- 识别性能与 Basic 版本和 Pro 版本一样强大
- AI 辅助分割,用于稳妥识别零件——即使在工件较薄的情况下也是如此
- 输出精确的零件坐标以便进一步处理
- 软件和机械手之间的 TCP/IP 通信接口
- 机械手与相机的手眼校准
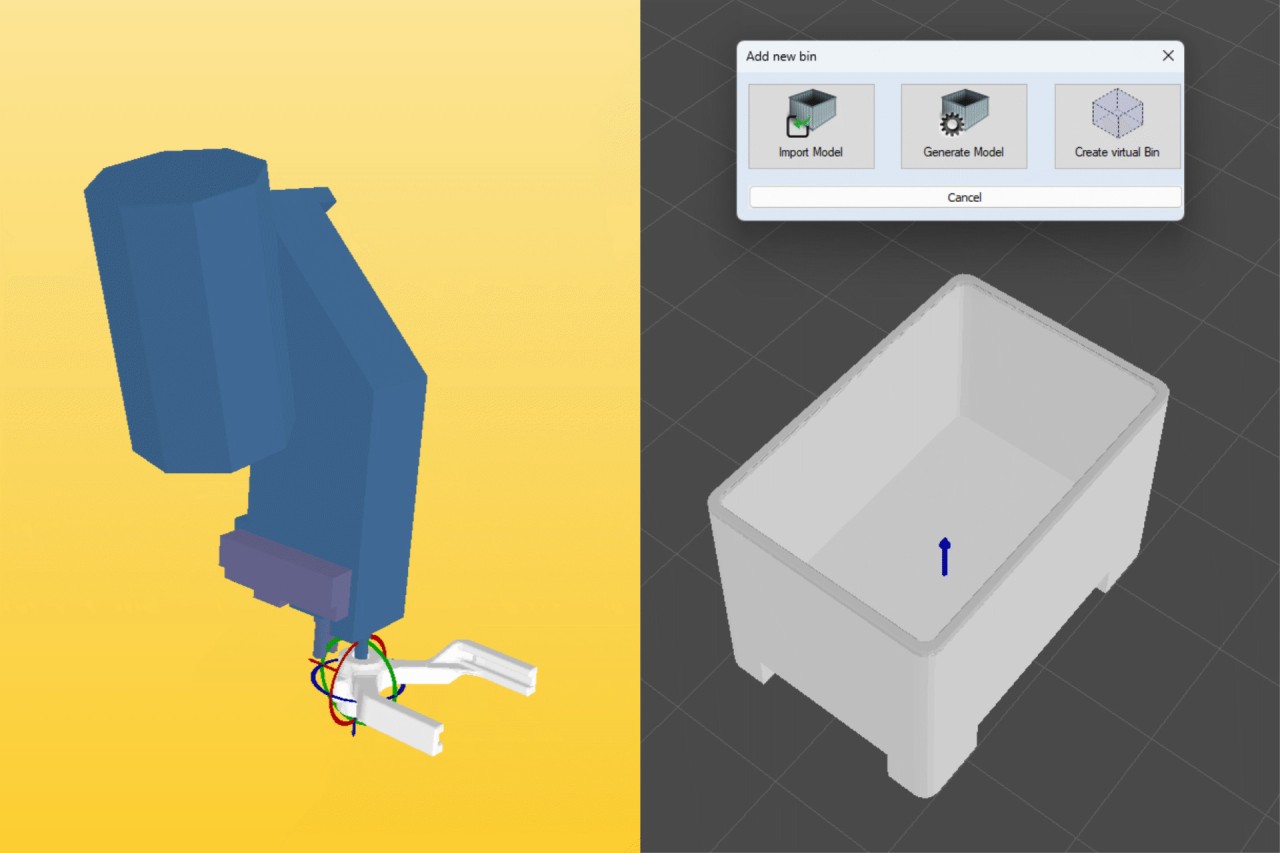
- 工件和容器的 3D 布置(创建、导入、对齐模型)
您的工件。我们的测试。明确的结果。您的决定。
您的工件适合进行容器内随机取物吗?通过免费的可行性分析,让我们一起找出答案。
在位于肯普滕的技术中心,我们在真实条件下对您的工件进行了测试,并实时向您展示它们是否适合容器内随机取物解决方案。根据您的要求,我们可以亲临现场,并直接展示该技术。
请使用我们的,开始您的免费可行性分析。
Liebherr - LHRobotics.Vision - 如何通过 4 个步骤实现随机容器内取物
宣传册下载专区
您的机械手视觉工艺包联系人
我们很乐意回答您有关机械手视觉应用的问题。
Jürgen Groß
LHRobotics.Vision 销售部
Liebherr-Verzahntechnik GmbH
Kaufbeurer Straße 141
87437 Kempten
德国
电话:+49 831 786 0
有关我们视觉系统的更多信息
请阅读我们的客户杂志和新闻稿中的精彩文章





