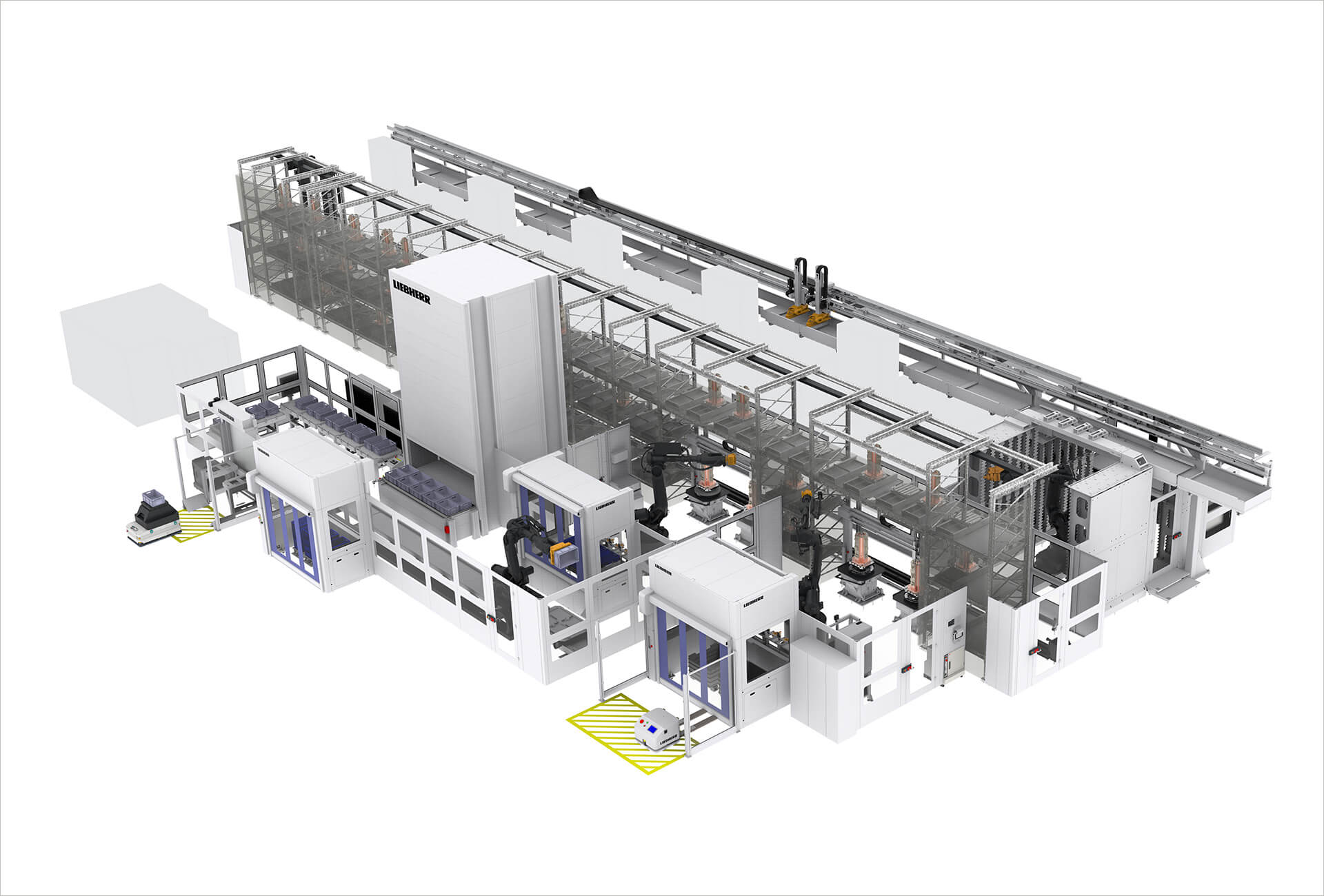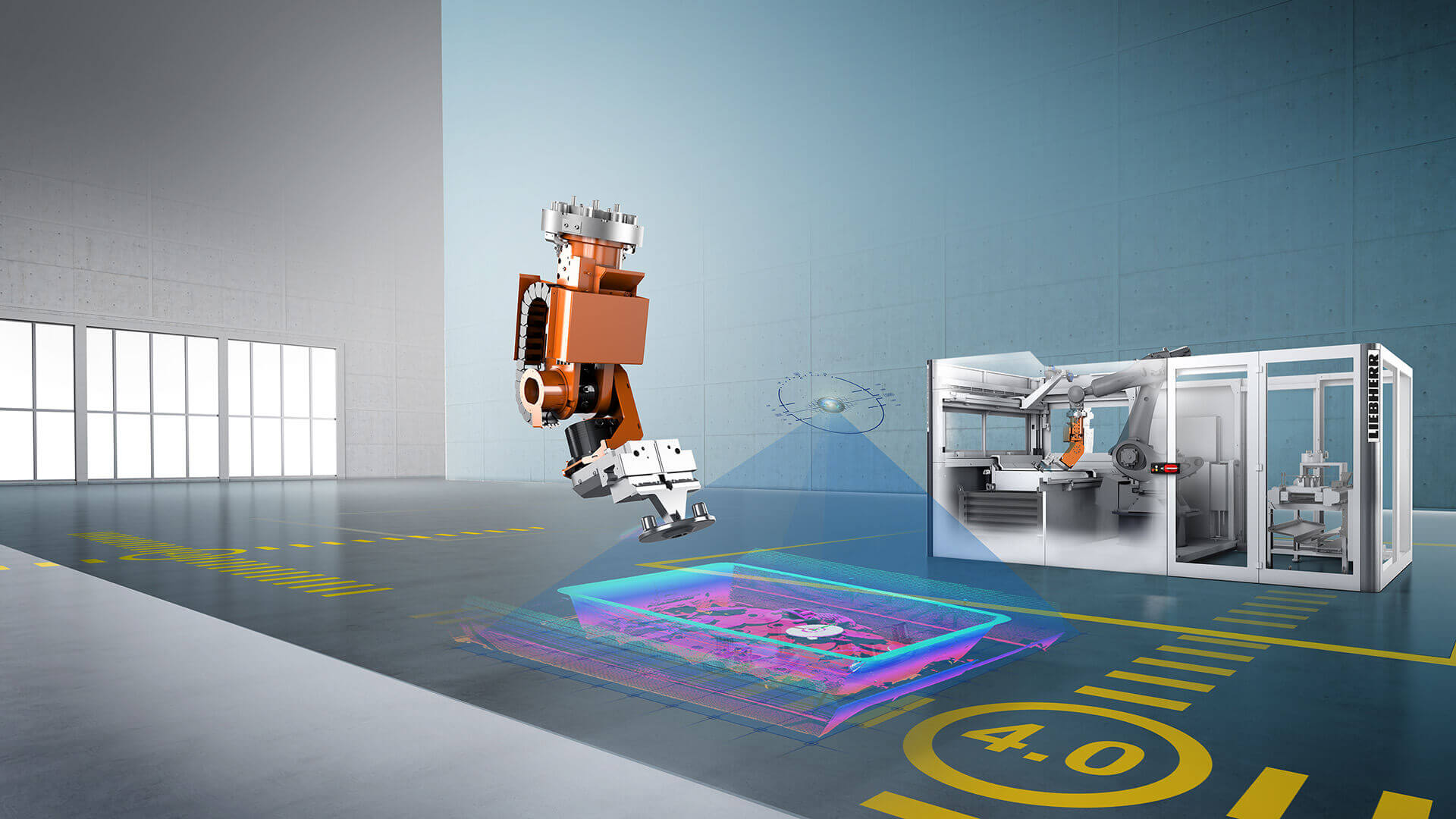
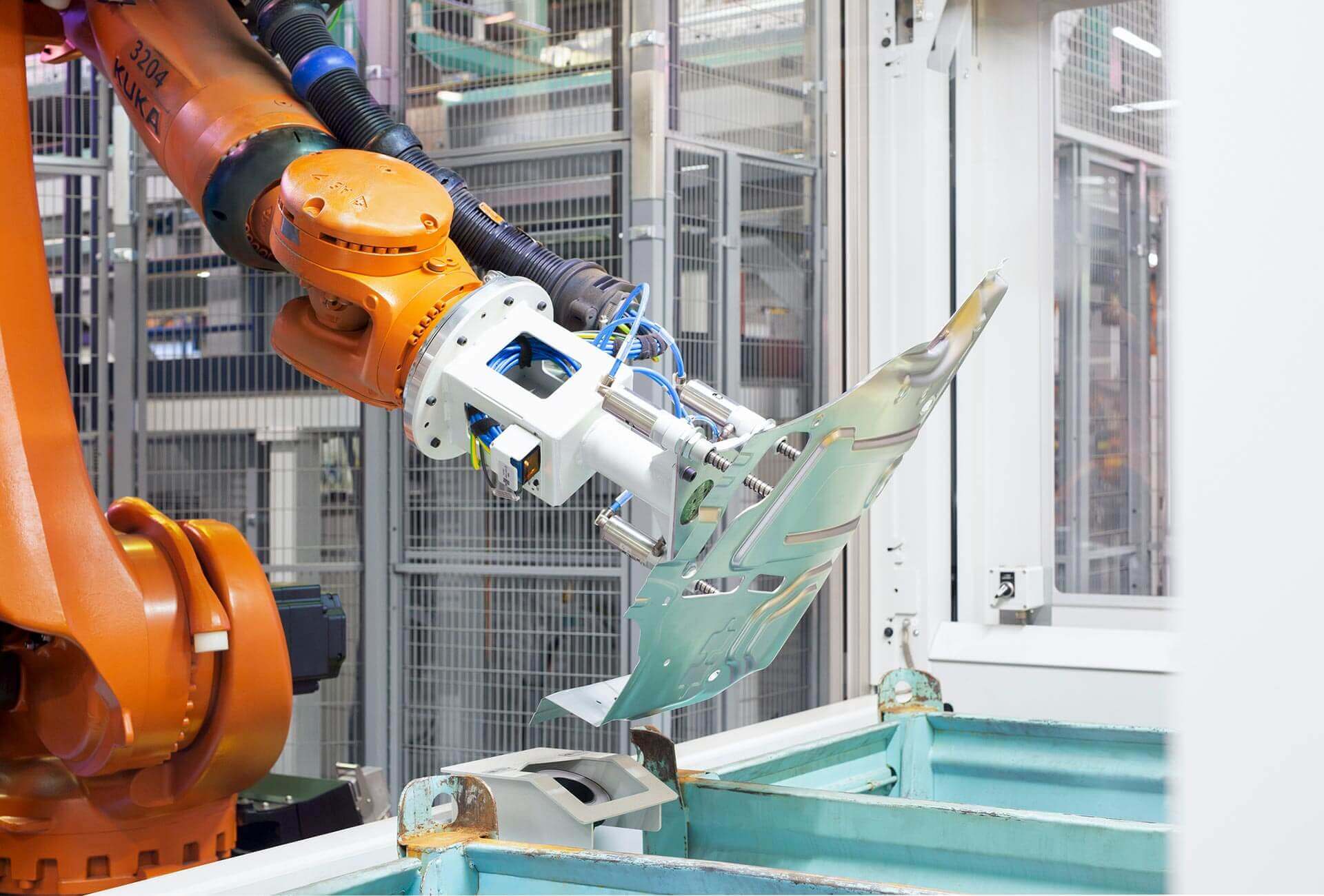


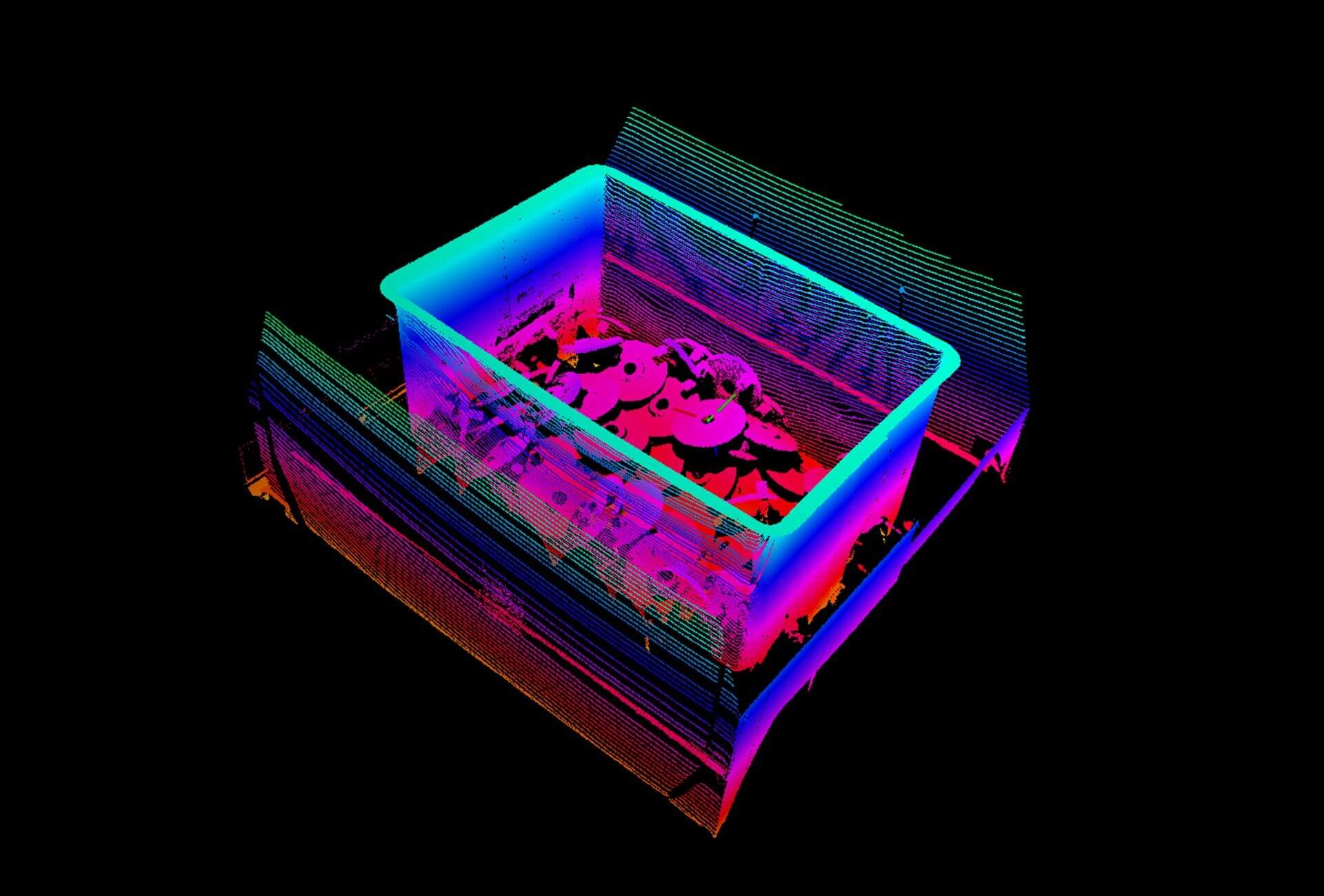


Alimentação automatizada de chapas de carroceria
A chapa para a estrutura lateral do carro é transportada para o módulo de alimentação em grandes caixas de metal por um trem de reboque. No módulo de alimentação, o sistema de visão 3D primeiro digitaliza a posição da caixa por cima e a posição exata das chapas da carroceria na caixa. Com base neste escaneamento, o robô remove a chapa da caixa com uma garra de sucção flexível de três pontos e a alimenta para uma câmera 2D. A câmera controla a posição dos componentes e reconhece quando dois componentes foram agarrados ao mesmo tempo.
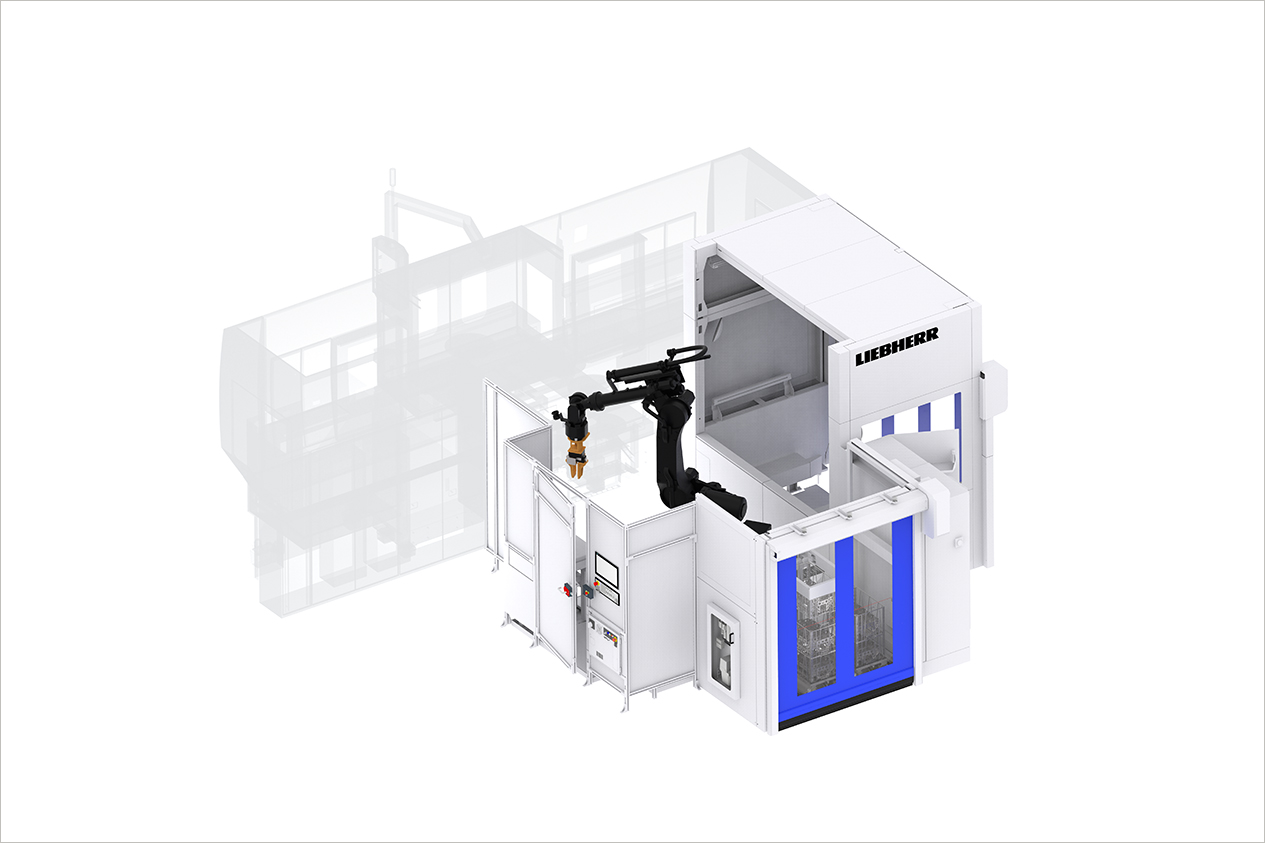
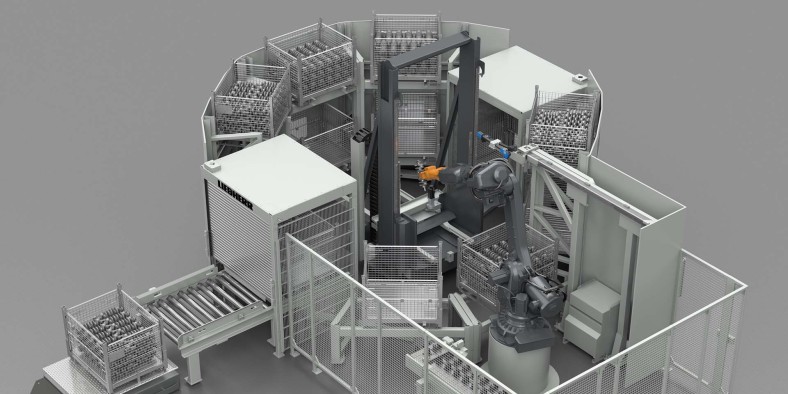
Carregamento do torno e separação em cestos de arame
As peças brutas de engrenagens nas caixas são descarregadas no módulo de alimentação com a empilhadeira. Após a câmera digitalizar o material a granel, as peças são separadas com uma garra magnética e colocadas em uma estação de orientação. Em seguida, o robô muda para uma garra paralela para pegar a peça, reorientá-la e transferi-la para o torno para usinagem. Após a usinagem, as peças são carregadas nos cestos de arame de uma célula de empilhamento e a pilha completa de cestos pode ser removida pelo operador.
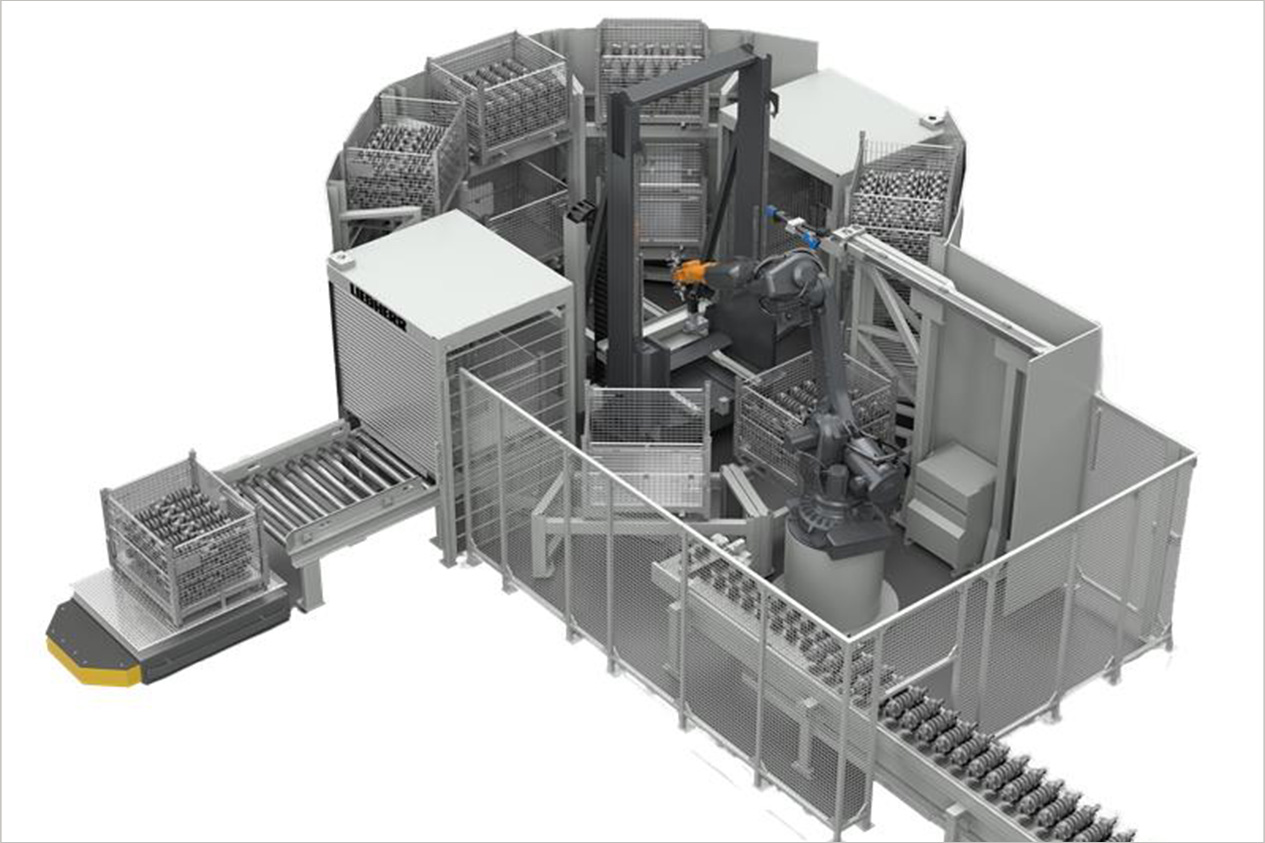
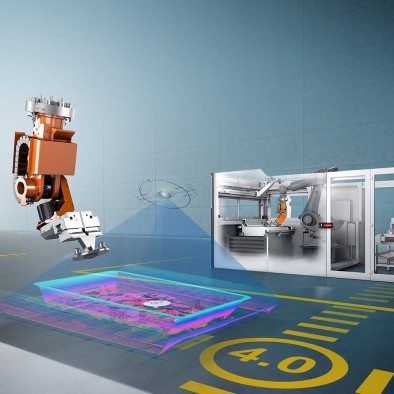
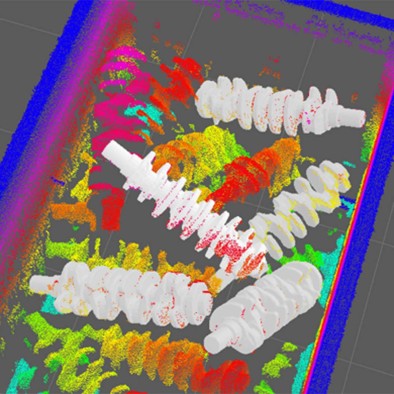
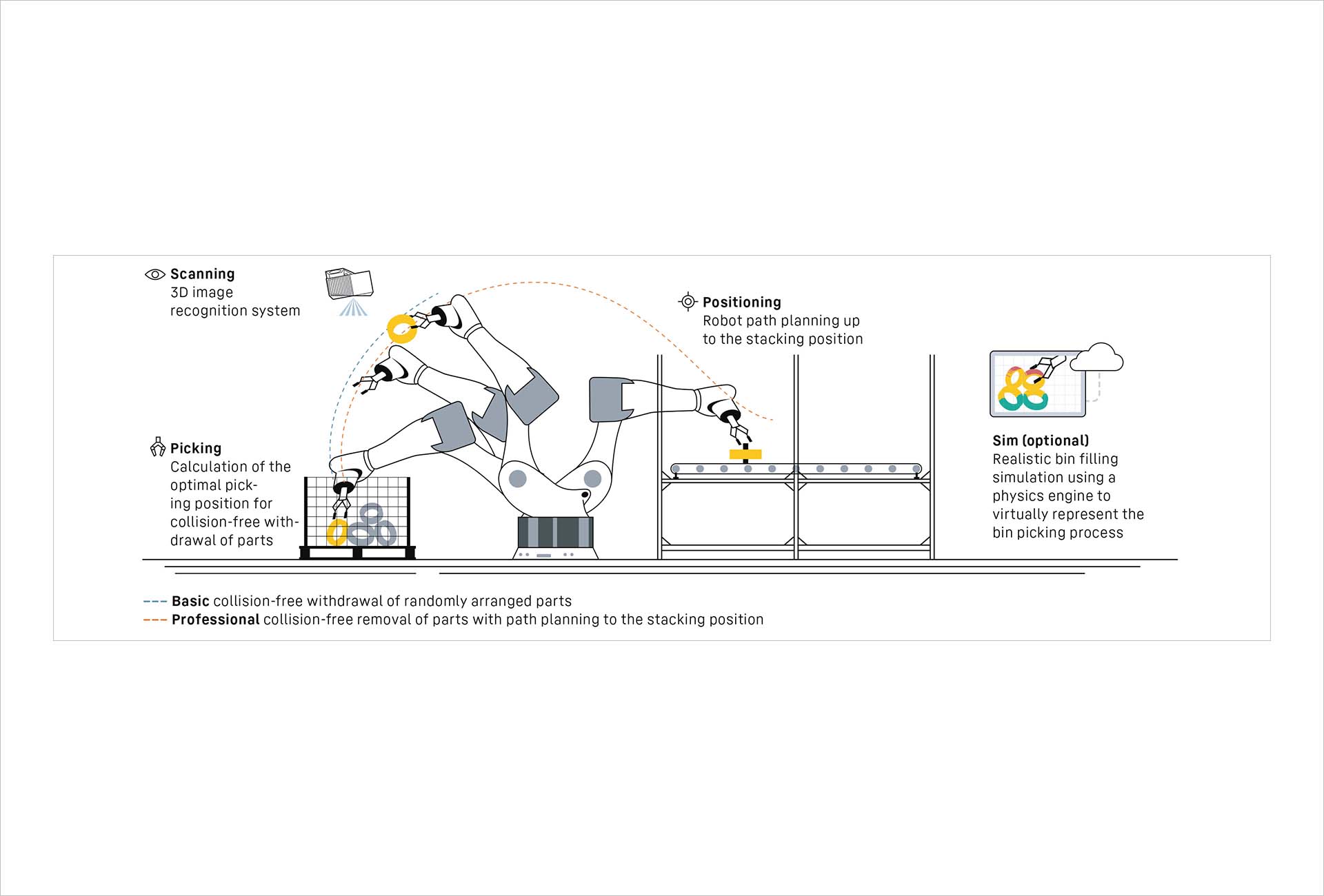
Entrada na linha com armazenamento em buffer para virabrequins
A entrada altamente flexível na linha foi realizada combinando o sistema de carga rotativa Liebherr RLS e a aplicação de Bin Picking. As peças brutas do virabrequim são armazenadas de forma caótica em caixas de malha de arame e são entregues na entrada da linha por meio de um sistema de transporte guiado automaticamente AGV. As quantidades especificadas para os diferentes tipos de componentes são controladas através do computador central do cliente