テクノロジーパッケージ
細部を見逃さない気配り
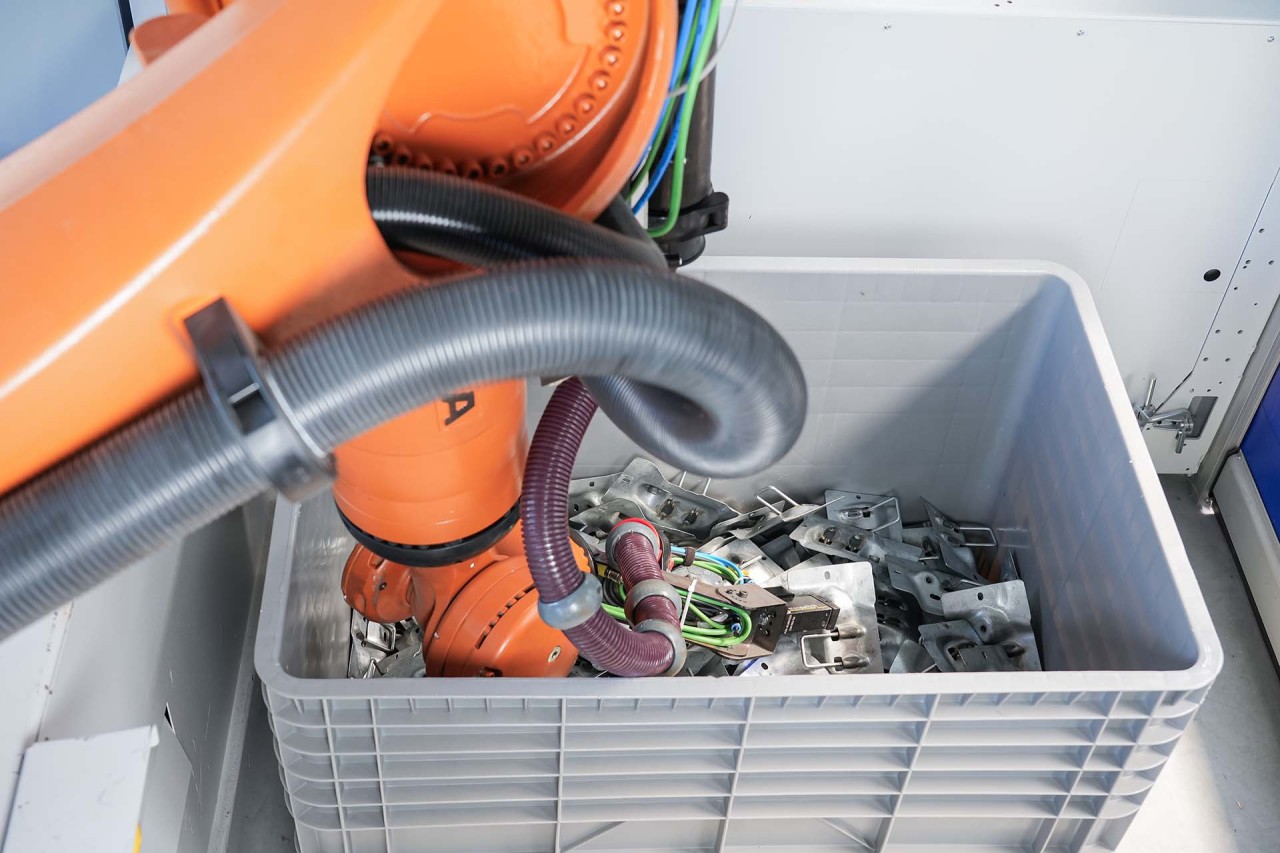
このテクノロジーパッケージには、正確な物体識別、物体選択、そして衝突を起こさず部品の取り出しを実現するビンピッキング用のLHRobotics.Visionソフトウェアが含まれています。また、プレースポイントまでのロボットのパスプランニングもオプションで用意しています。アプリケーションには追加でプロジェクターベースのビジョンシステムが必要となります。
LHRobotics.Visionソフトウェアの主な特徴
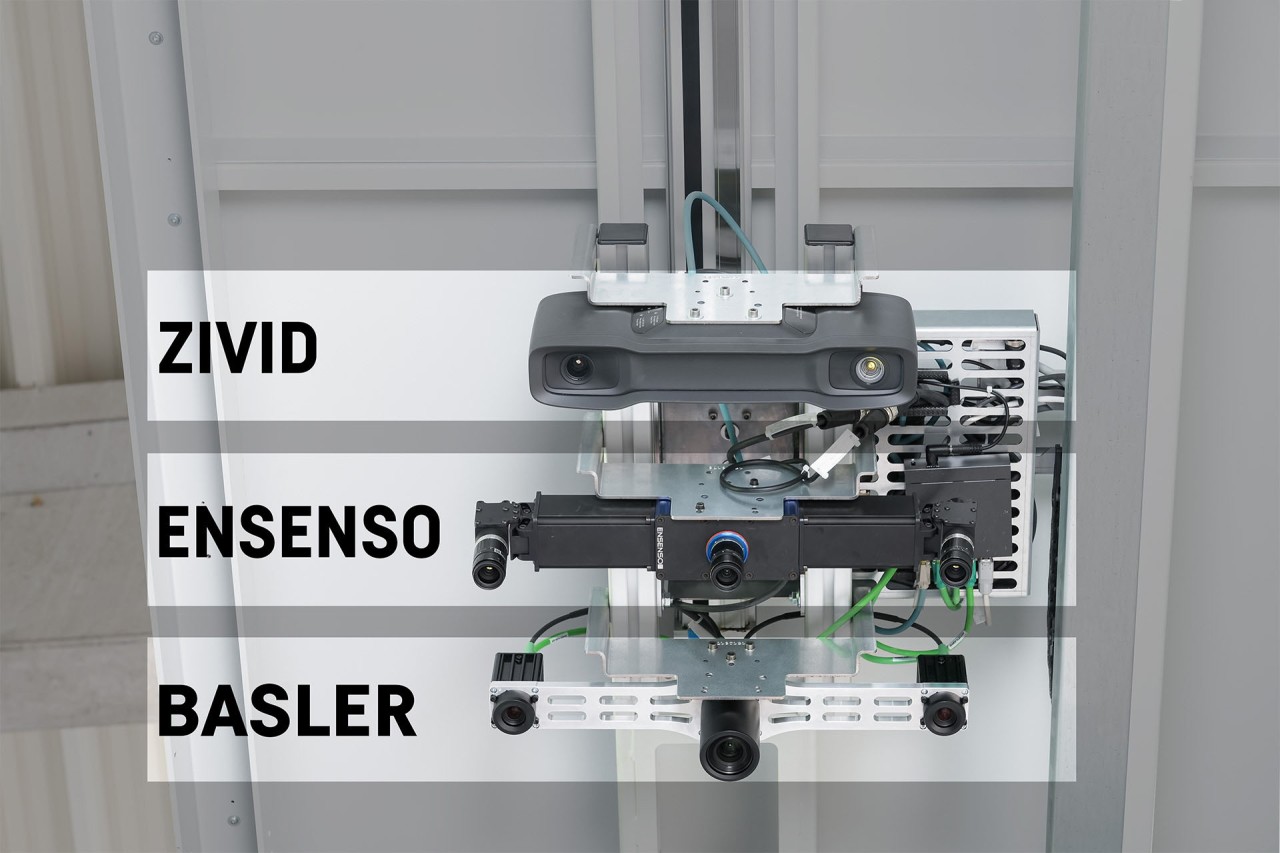
どのメーカーの3Dカメラも使用可能

ビンピッキングおよび3Dビジョンソリューションにおける最前線の現場で築き上げた専門知識

様々なメーカーのロボットに対応
ビンピッキング用の直感的なユーザーインターフェイス: セットアップから連続生産まで、より迅速に
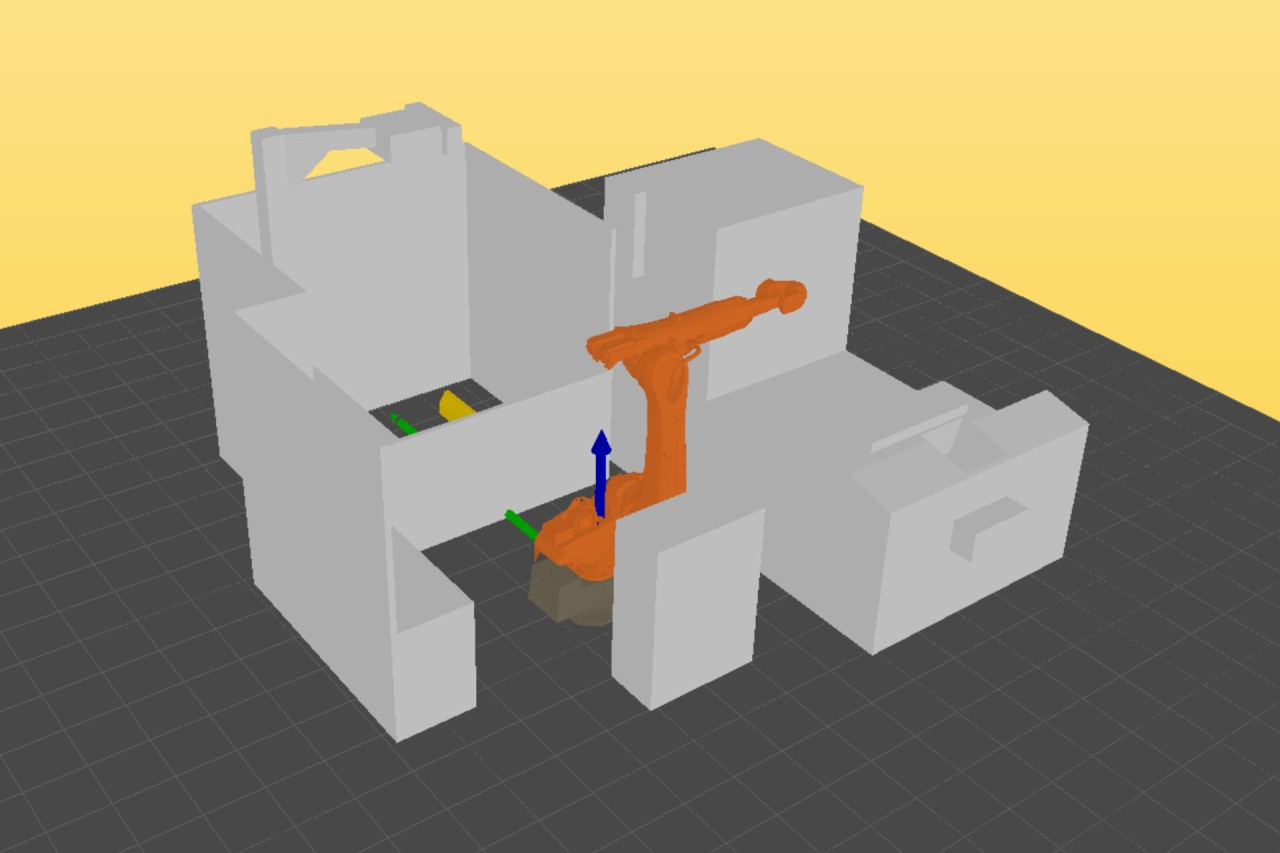
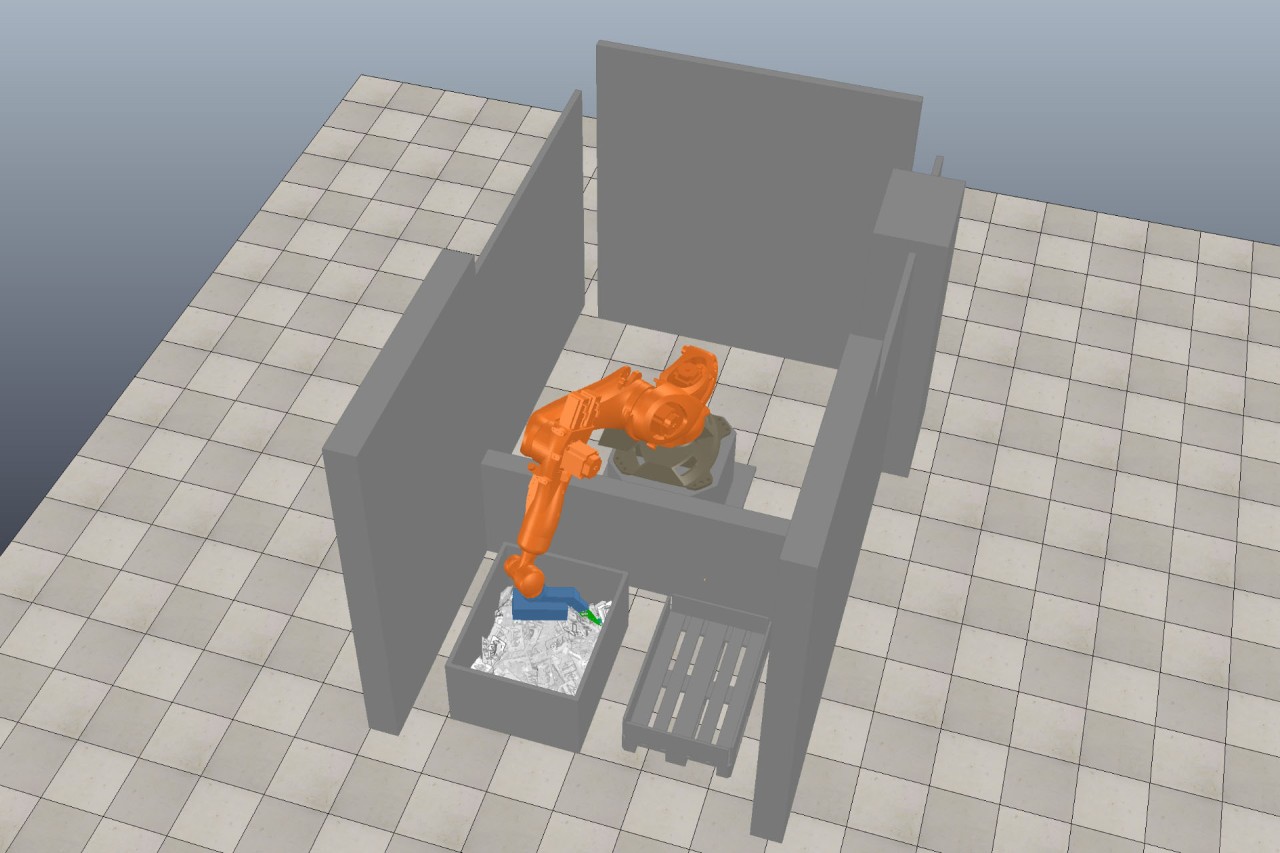
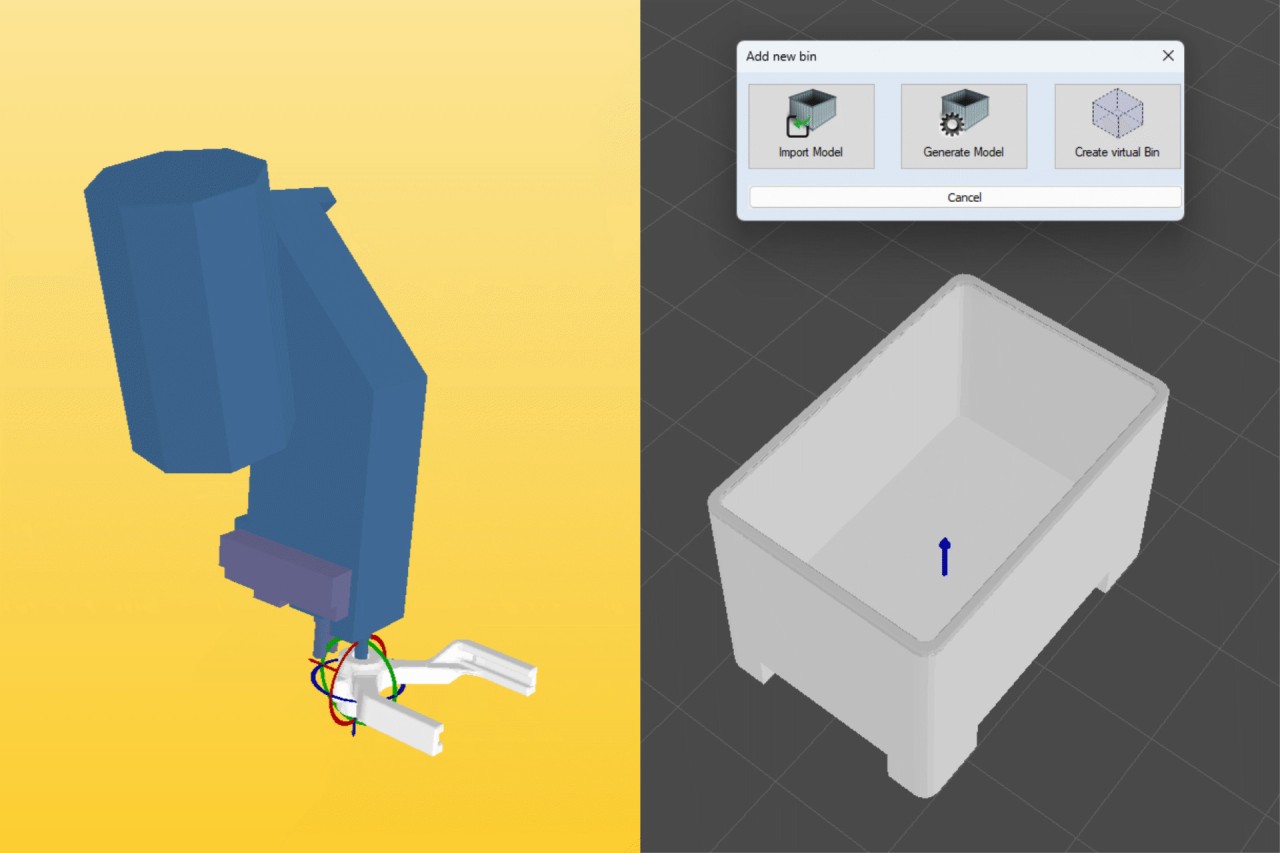
シミュレーション :
リスクを最小限に抑え、プロセスを完璧にします

重なり判定機能: 密集しているワークも確実にグリップ
AIが難題の解決に光をもたらします
バージョン3.4以降、AIが自動的に検出パラメータを最適化します。
オペレーターが点群内のワークの位置を一度定義すれば、ソフトウェアが自動スキャンを数回実行し、最適な設定を自動的に算出します。
結果:より安定した、ロバスト性と再現性が高い検出: 手動での微調整は不要。
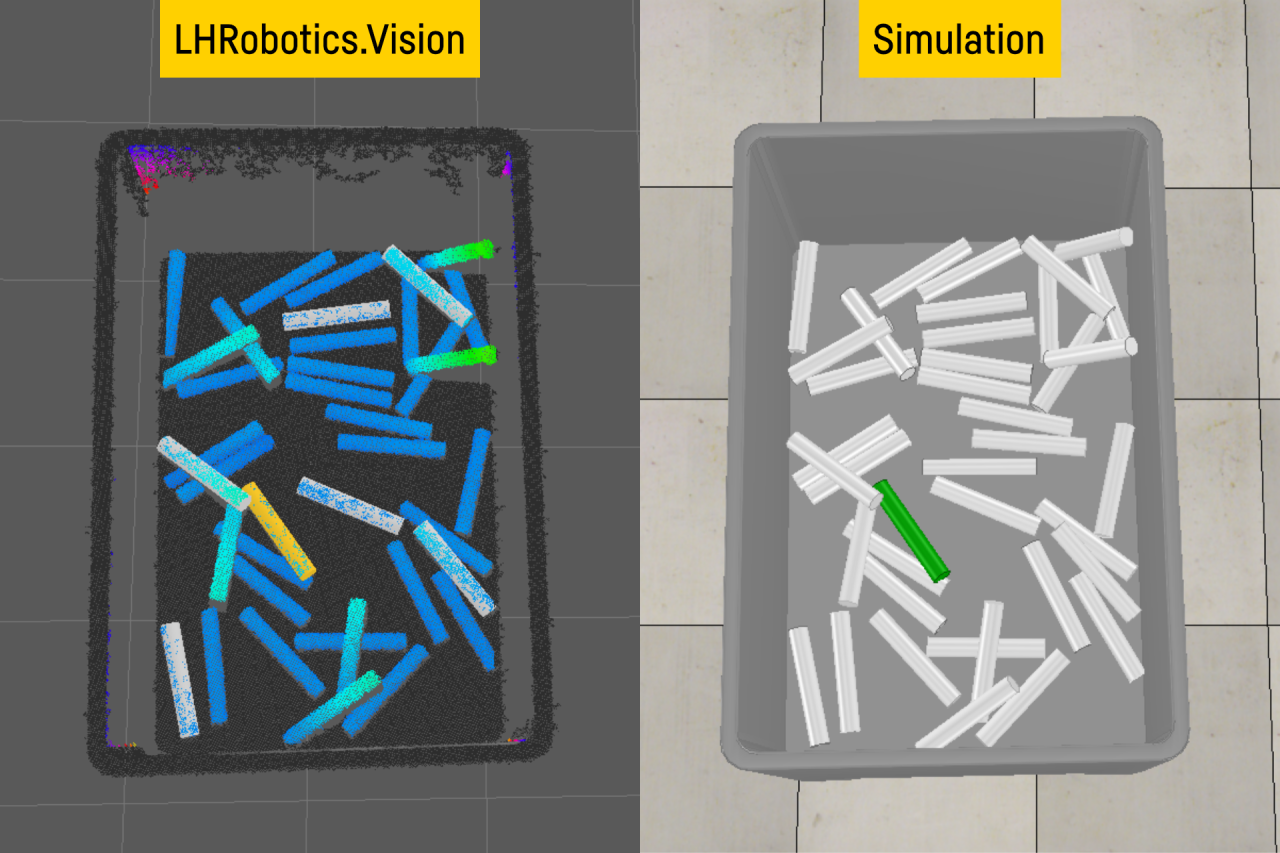
AIによるセグメンテーション
重要なものだけを見る
各カメラからの生データを処理し、フィルターとAIセグメンテーションで最適化します。
これにより、構成要素マッチングが加速され、最良かつ最速の結果が得られます。

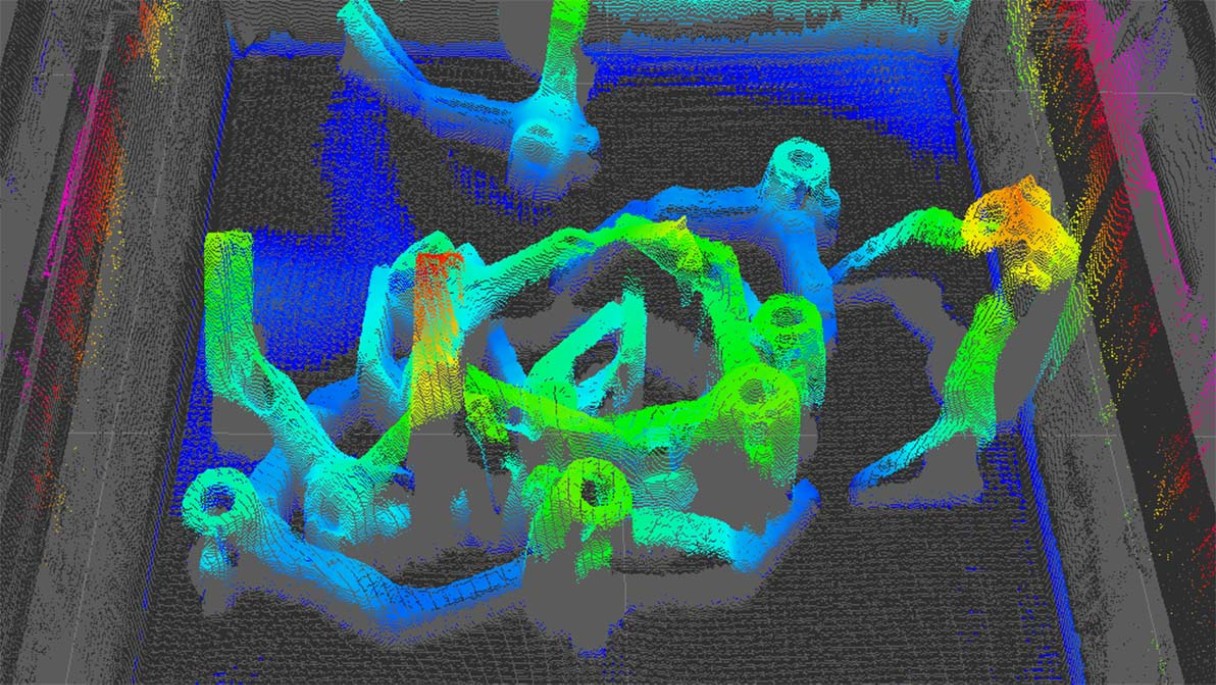
実際の例

点群
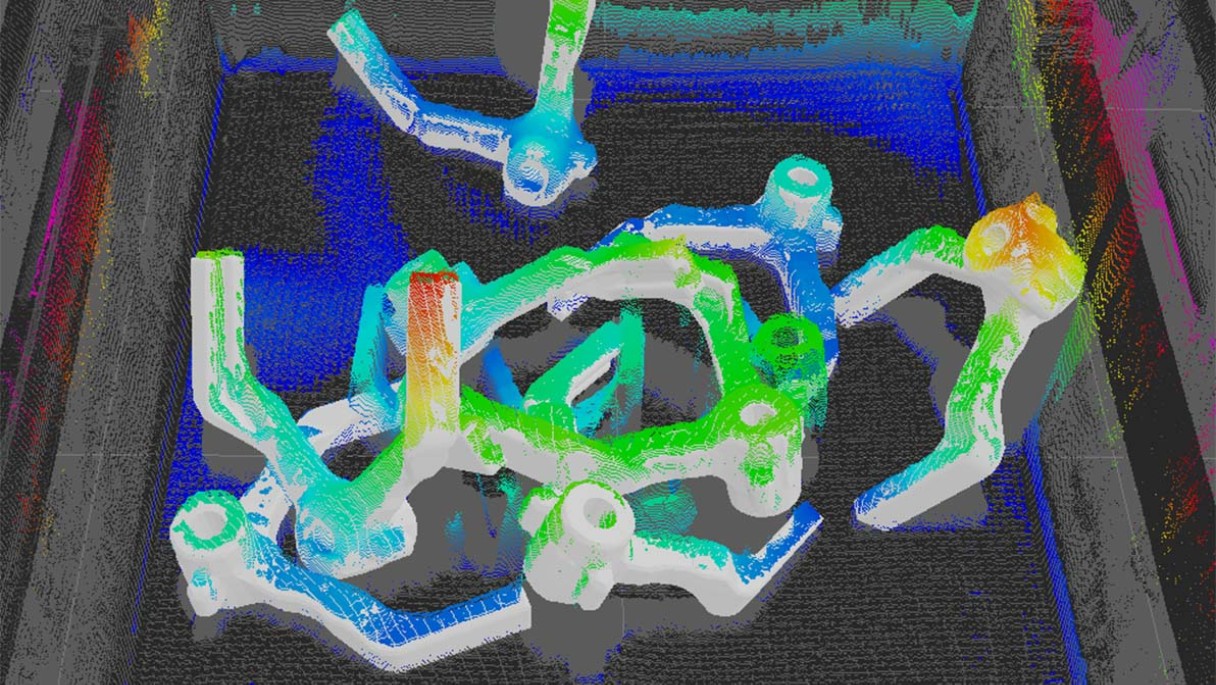
セグメント分割された点群
使用例
ライセンスの種類
DETECT
高精度な3D検出:カメラメーカーを問わず、実用性を重視した設計。
DETECTは、使用するカメラのメーカーを問わず、ワークを確実に3D検出するためのすべての主要機能を備えており、すべてのライセンスレベルのベースとなります。
- 点群でのワークの3Dマッチング: あらゆる一般的な3Dカメラシステムに対応
- BasicやProと同じ強力な検出性能
- AIがサポートするセグメンテーションにより、薄肉のワークでも高精度な部品検出を実現
- 後工程のための正確なワーク座標の出力
- ソフトウェアとロボット間のTCP/IP通信インターフェイス
- ロボットとカメラのハンドアイキャリブレーション
- ワークと収容箱の3Dレイアウト構築(モデルの作成、インポート、配置)
お客様の実際のワークを、当社でテストすれば、明確な結果が出ます:お客様は決断するだけです。
お客様のワークがビンピッキングに対応しているかどうか?無料のフィージビリティ分析で、一緒にその答えを見つけましょう。
ドイツ、ケンプテンの技術センターでは、お客様のワークを実際の条件下でテストし、いかにビンピッキングソリューションに適しているかを実際にお見せすることができます。ご要望があれば、現地においでいただき、技術について直接ご説明いたします。
を利用して、無料フィージビリティ分析を開始してください。
Liebherr - LHRobotics.Vision: 4つのステップでビンピッキングを導入する方法
パンフレットのダウンロード
ロボットビジョンテクノロジーパッケージに関するお問い合せ先
ロボットビジョンアプリケーションに関するご質問に喜んでお答えします。
Jürgen Groß
販売:LHRobotics.Vision
Liebherr-Verzahntechnik GmbH
Kaufbeurer Straße 141
87437 Kempten
ドイツ
電話: +49 831 786 0
ビジョンシステムに関する詳細情報
当社のカスタマーマガジンおよびプレスリリースの興味深い記事をご覧ください





