


O pacote de tecnologia
De olho nos detalhes
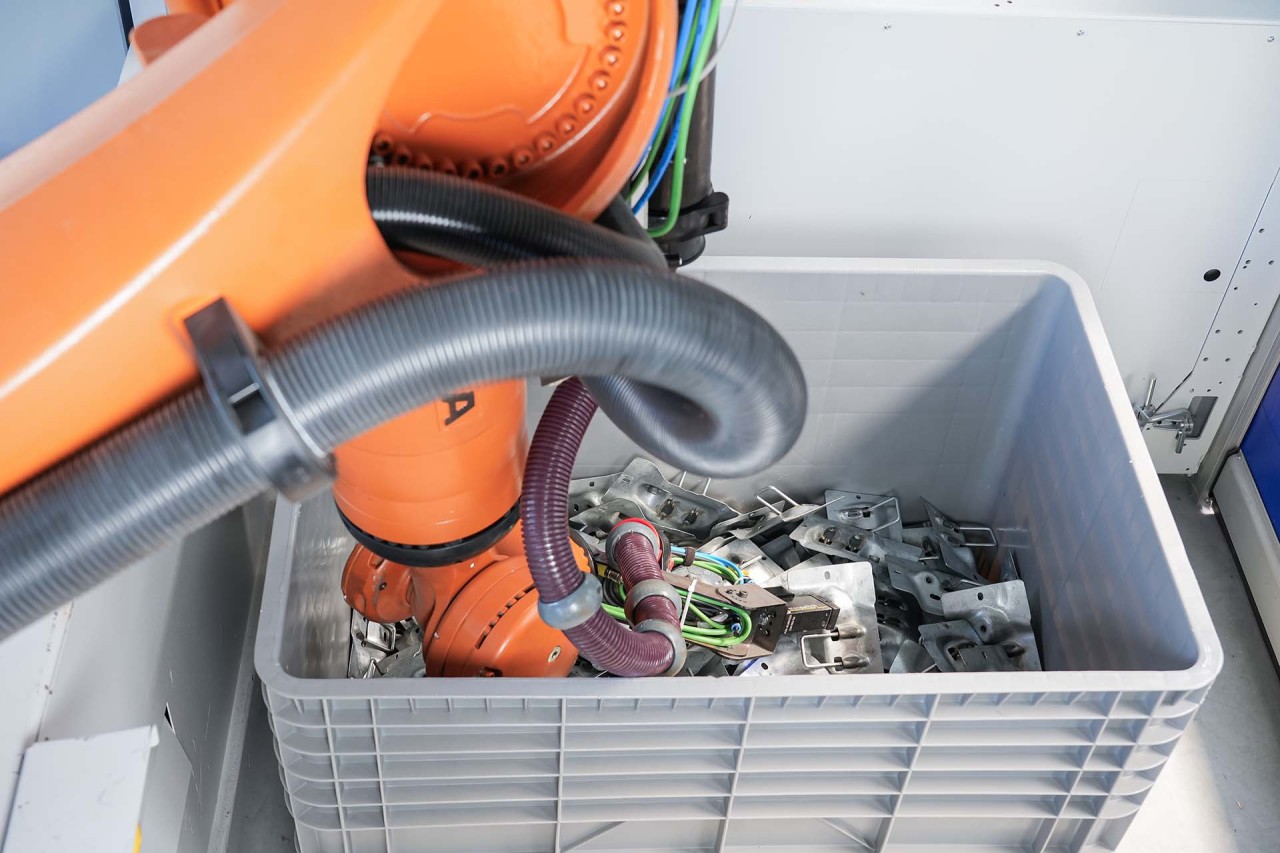
O pacote de tecnologia inclui o software LHRobotics.Vision para Bin Picking, que permite detectar e selecionar objetos de maneira precisa e facilitar a extração de componentes sem colisões. Como opcional, o software também pode realizar o planejamento da rota do robô até o local de depósito. Para a aplicação, é necessário ter um sistema de visão baseado em projetor.
Principais características do software LHRobotics.Vision
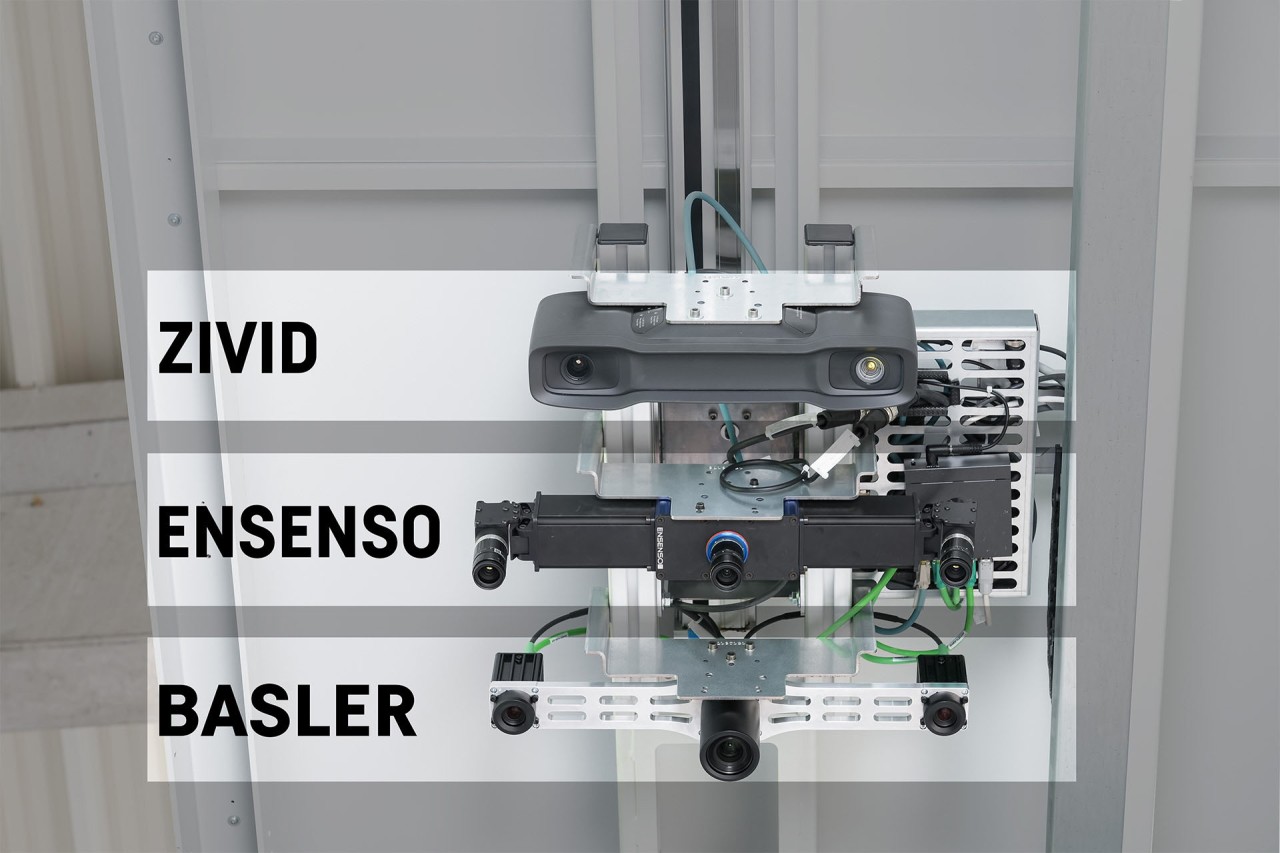
Integração de câmera 3D independentemente de fabricante

Competência direta para Bin Picking e soluções 3D Vision

Amplo apoio robotizado
Interface de operação intuitiva para Bin Picking, muito mais rápido desde a configuração até a produção em série
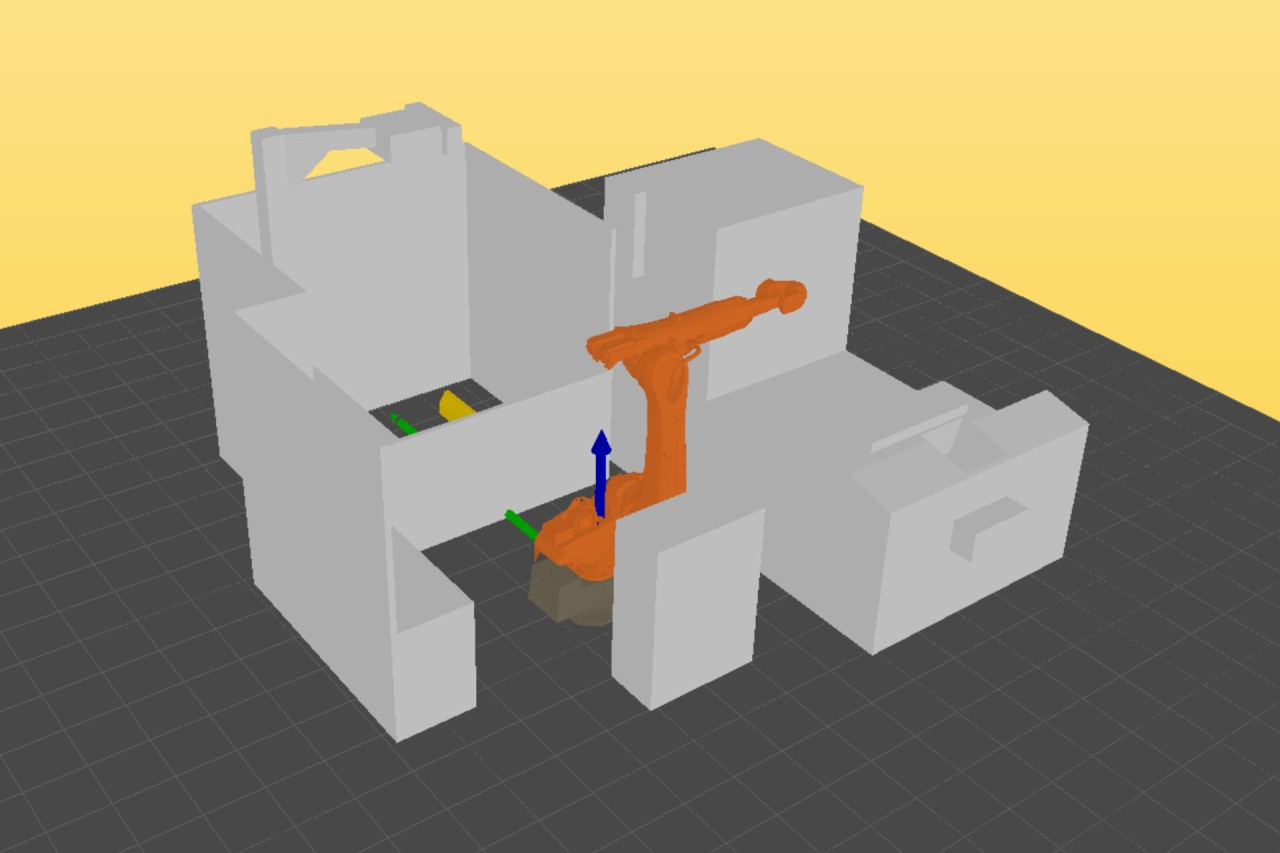
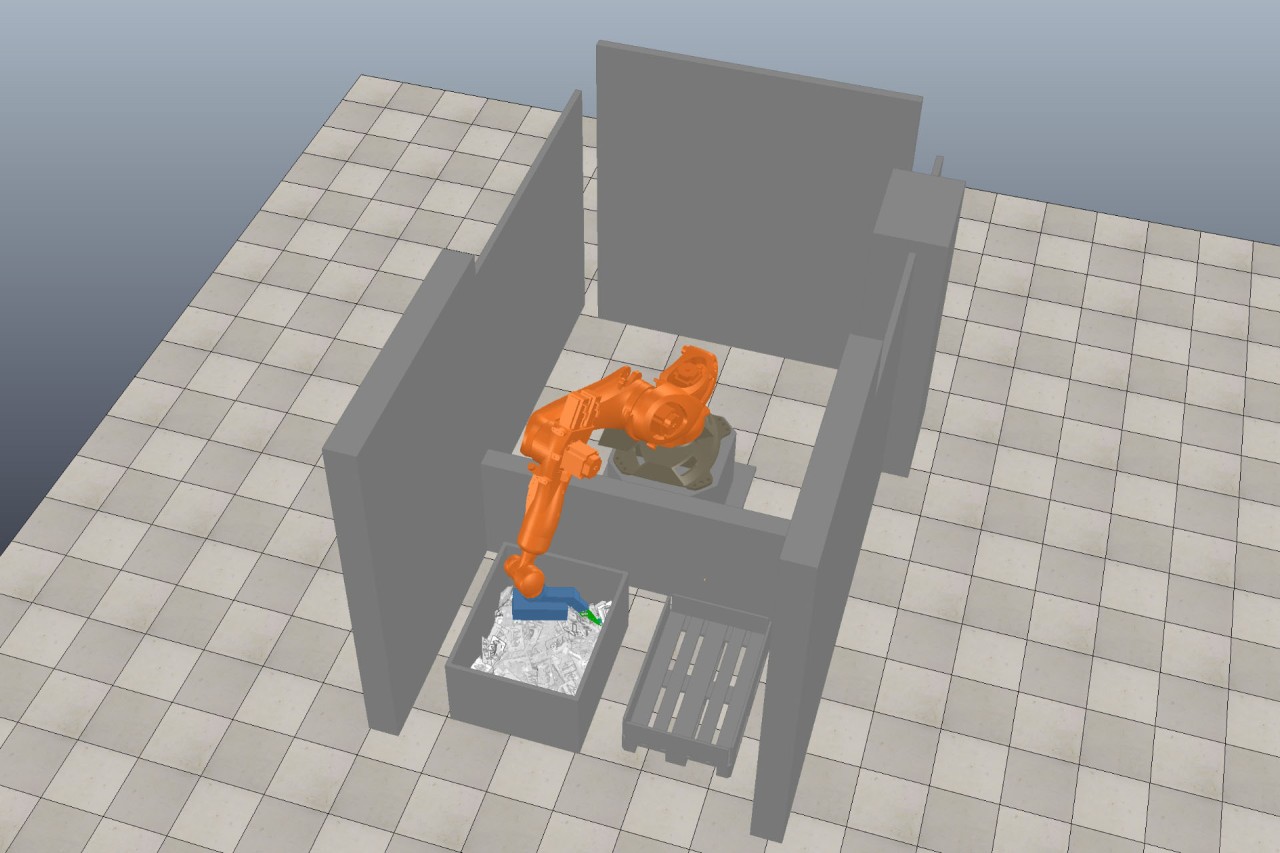
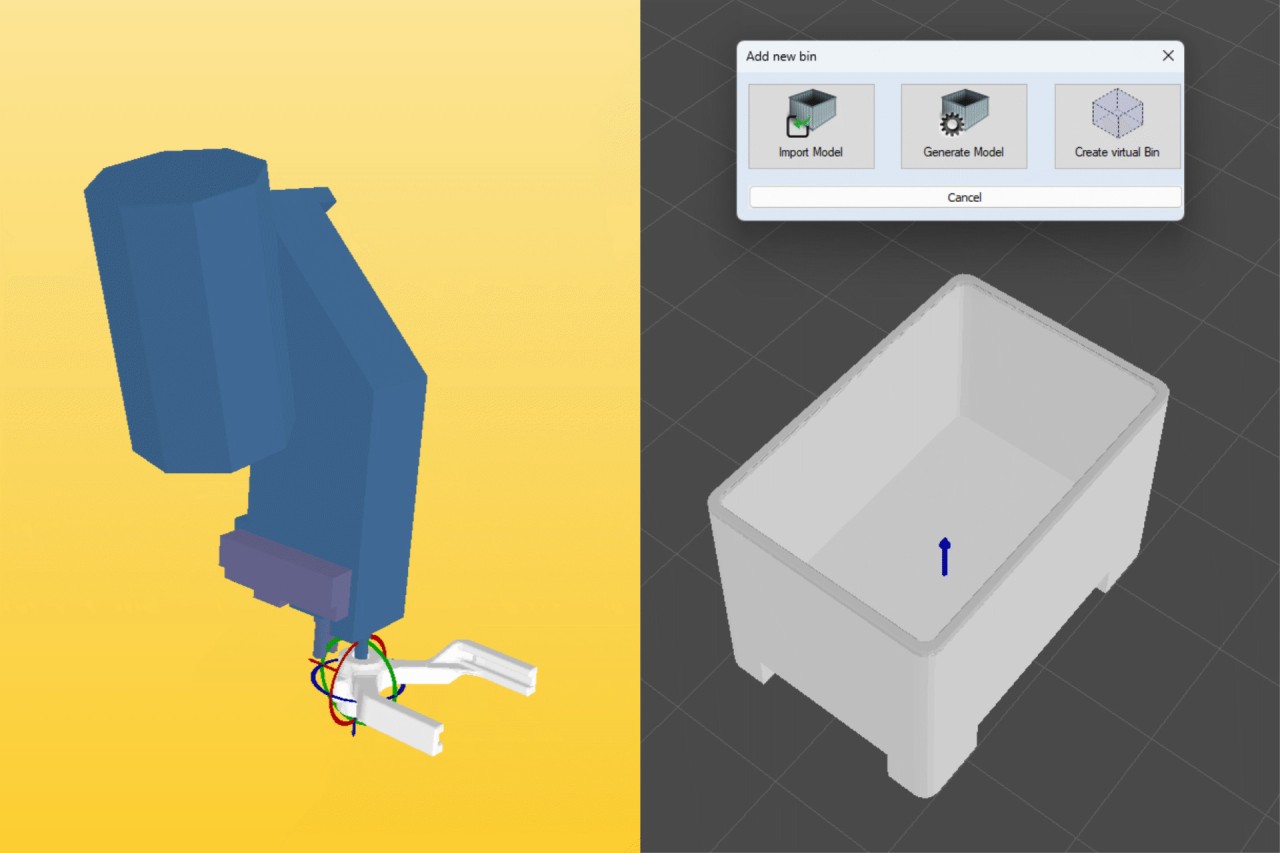
Simulação –
minimizar riscos, aperfeiçoar processos

Função de sobreposição que permite a pega segura mesmo com partes armazenadas bem próximas umas das outras
A inteligência artificial (IA) resolve as dúvidas
Desde a versão 3.4, a IA otimiza os parâmetros de detecção automaticamente.
O operador só precisa definir uma única vez onde as peças estão localizadas na nuvem de pontos. Depois disso, o software executa diversas varreduras e determina automaticamente as configurações adequadas.
Resultado: detecção mais estável, robusta e reproduzível sem necessidade de ajuste fino.
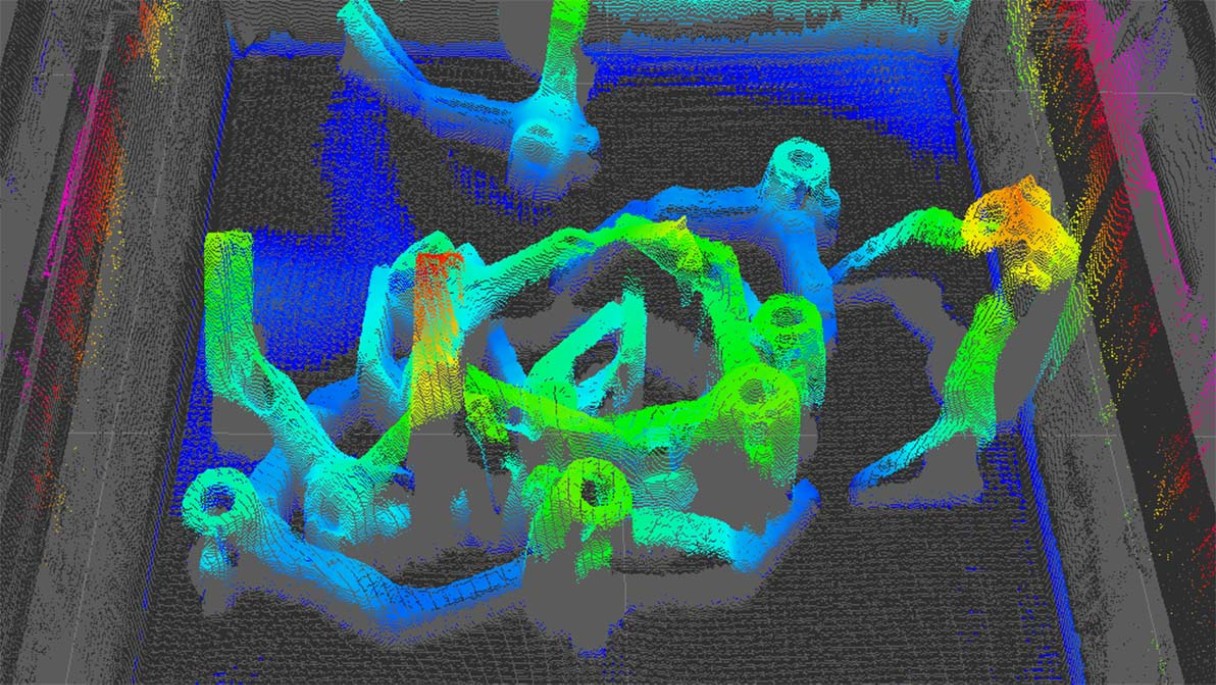
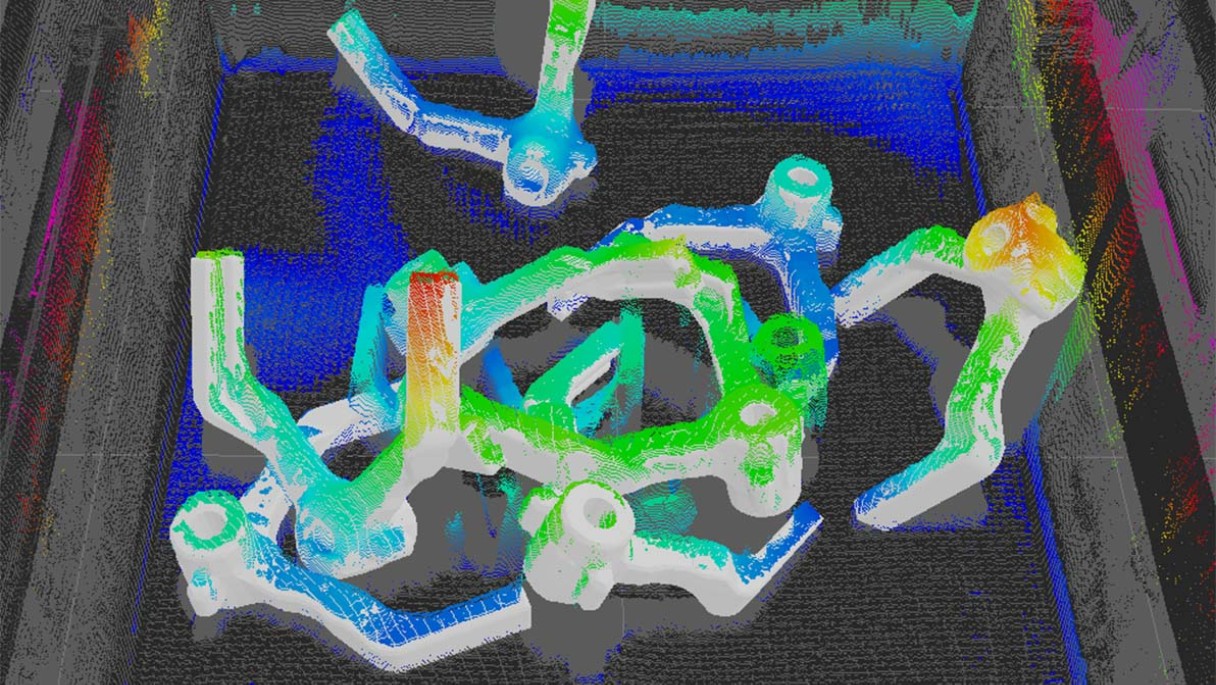
Segmentação por IA
Ver apenas o que importa
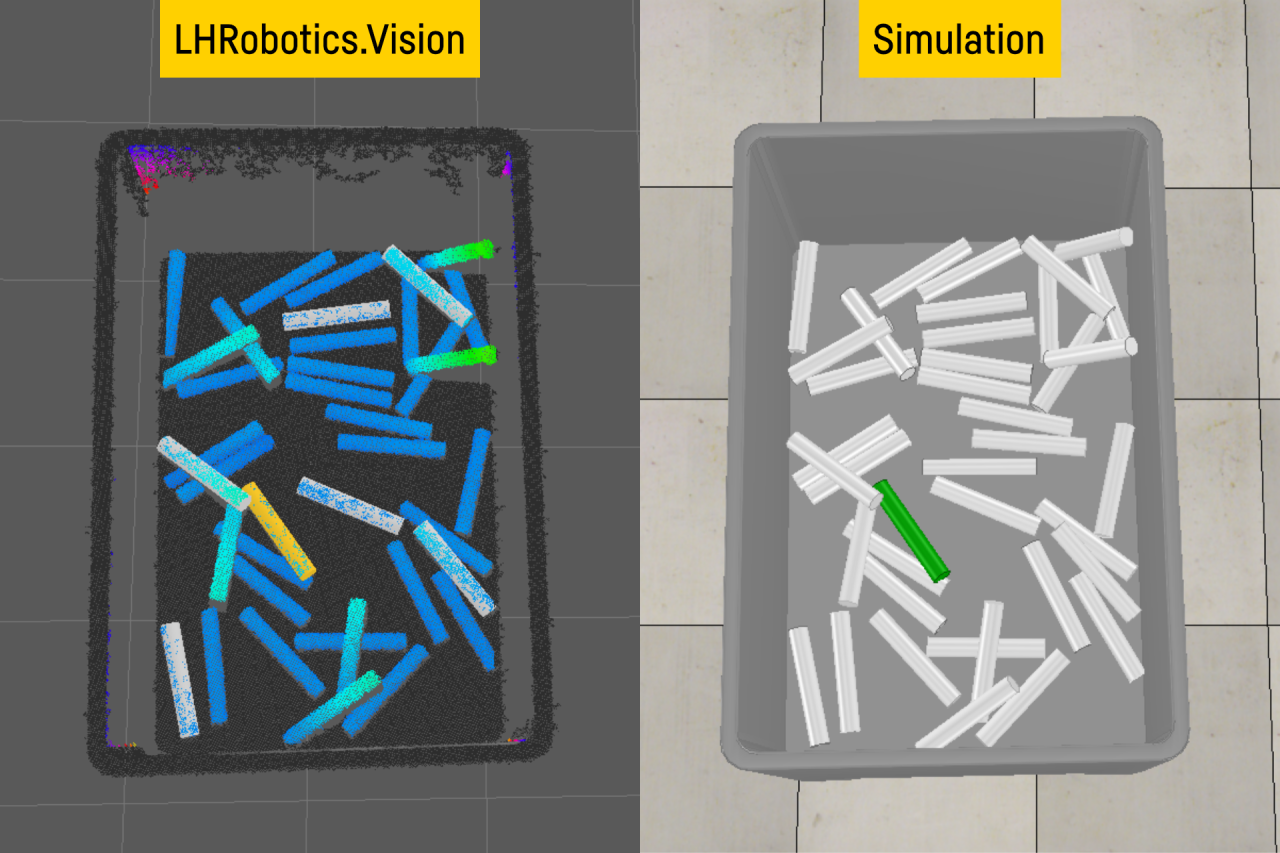
Nós processamos os dados brutos de cada câmera e os otimizamos com nossos filtros e segmentação por IA.
Com isso, aceleramos nossa correspondência de componentes e obtemos os melhores e mais rápidos resultados

Situação real

Nuvem de pontos
Nuvem de pontos segmentada
Casos de uso
Nossos modelos de licença
DETECT
Detecção 3D precisa, independentemente do fabricante da câmera, feita para a prática.
A DETECT oferece todas as funções essenciais para detecção 3D confiável de peças, independentemente do fabricante da câmera utilizada fornecendo, assim, a base para todos os demais níveis de licença.
- Correspondência 3D de peças em uma nuvem de pontos, compatível com todos os sistemas convencionais de câmeras 3D.
- O mesmo desempenho de detecção potente da versão Basic e Pro
- Segmentação apoiada em IA para uma detecção robusta de peças, mesmo no caso de peças finas
- Apresentação de coordenadas mais precisas da peça para o processamento subsequente
- Interface de comunicação TCP/IP entre software e robô
- Calibração mão-olho entre robô e câmera
- Configuração 3D de peças e recipientes (criar, importar e alinhar modelos)
A peça é sua. O teste é nosso. Os resultados são transparentes. A decisão é sua.
A sua peça é compatível com o Bin Picking? Vamos descobrir isso juntos, com uma análise de viabilidade gratuita.
No nosso Tech-Center em Kempten, testamos suas peças em condições reais e mostramos a você ao vivo o quanto elas são adequadas para uma solução de Bin Picking. Se desejado, podemos ir pessoalmente ao local e damos informações diretas sobre a tecnologia.
Use o nosso e dê início à sua análise de viabilidade gratuita.
Liebherr - LHRobotics.Vision - Como implementar o Bin Picking em quatro etapas
Área de download dos prospectos
Seu contato para pacotes de tecnologia robotizada Vision
Teremos todo o prazer em responder às suas perguntas sobre aplicações robotizadas Vision.
Jürgen Groß
Vendas da LHRobotics.Vision
Liebherr-Verzahntechnik GmbH
Kaufbeurer Straße 141
87437 Kempten
Alemanha
Telefone: +49 831 786 0
Mais informações sobre nossos sistemas Vision
Leia artigos incríveis em nossas revistas para clientes e comunicados para a imprensa.





