


The technology package
An eye for detail
The technology package includes LHRobotics.Vision Software for Bin Picking, which makes both precise object identification and selection while providing a collision-free part withdrawal path. Optionally, the software can also manage robot path planning up to the deposit position. An additional project-based vision system is required for this application.
LHRobotics.Vision Software key features
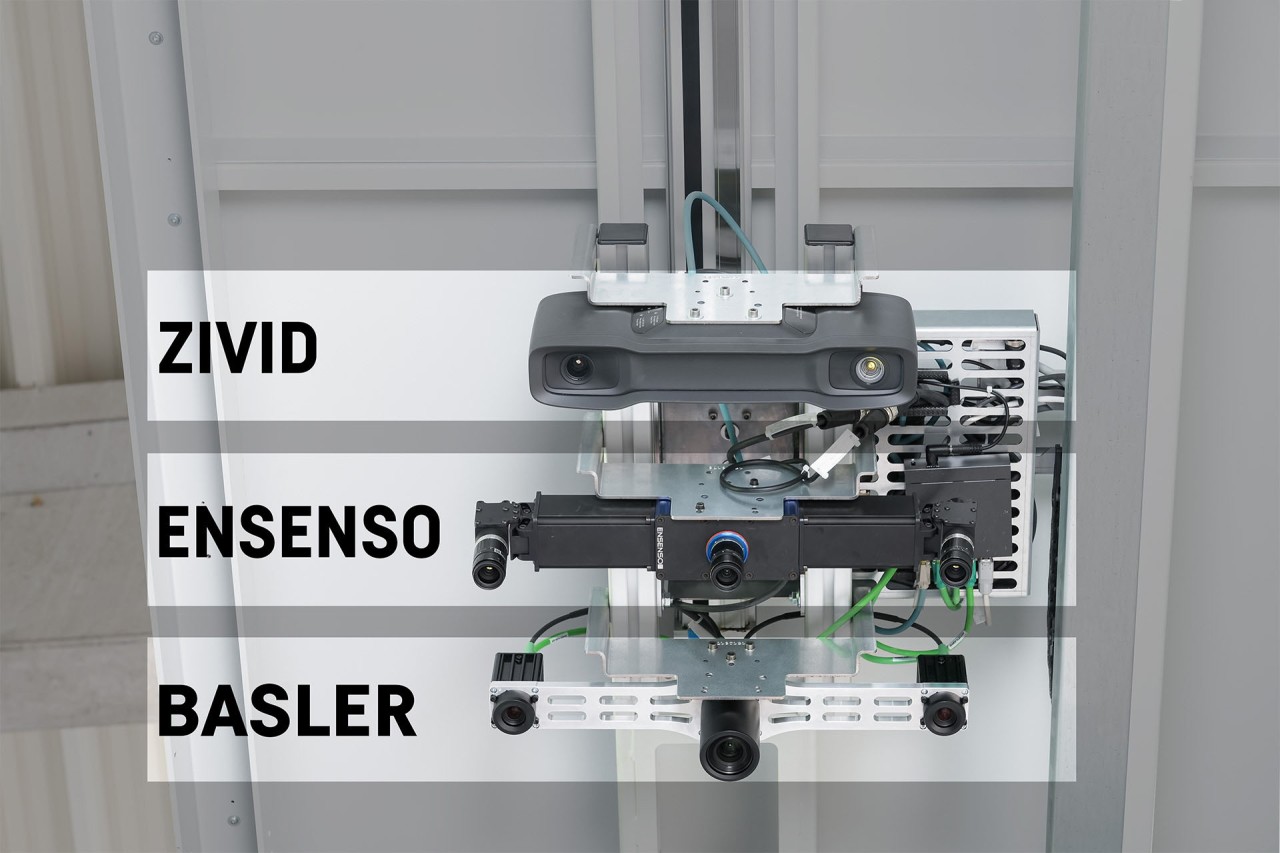
Manufacturer-independent 3D camera integration

First-hand expertise for bin picking and 3D vision solutions

Extensive robot support
Intuitive user interface for bin picking – faster to series production from setup
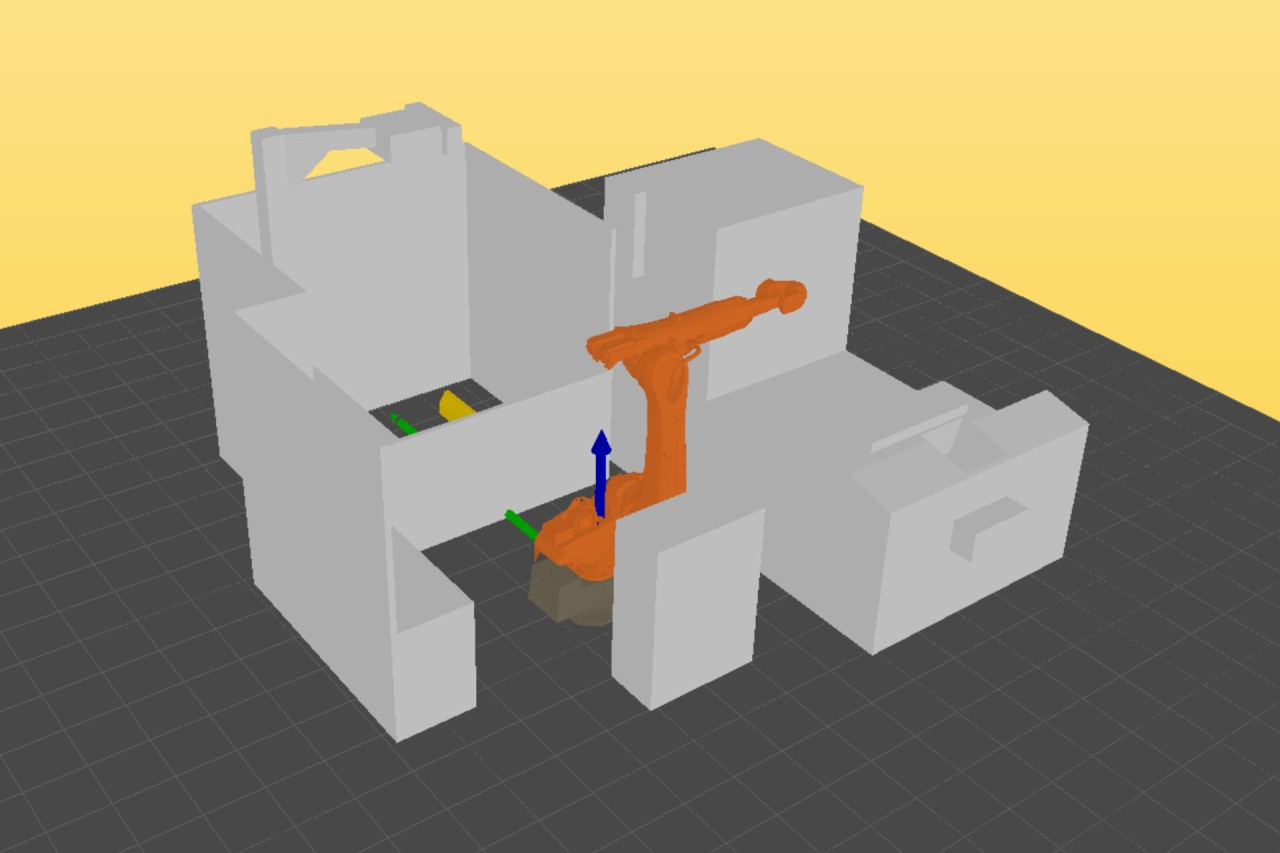
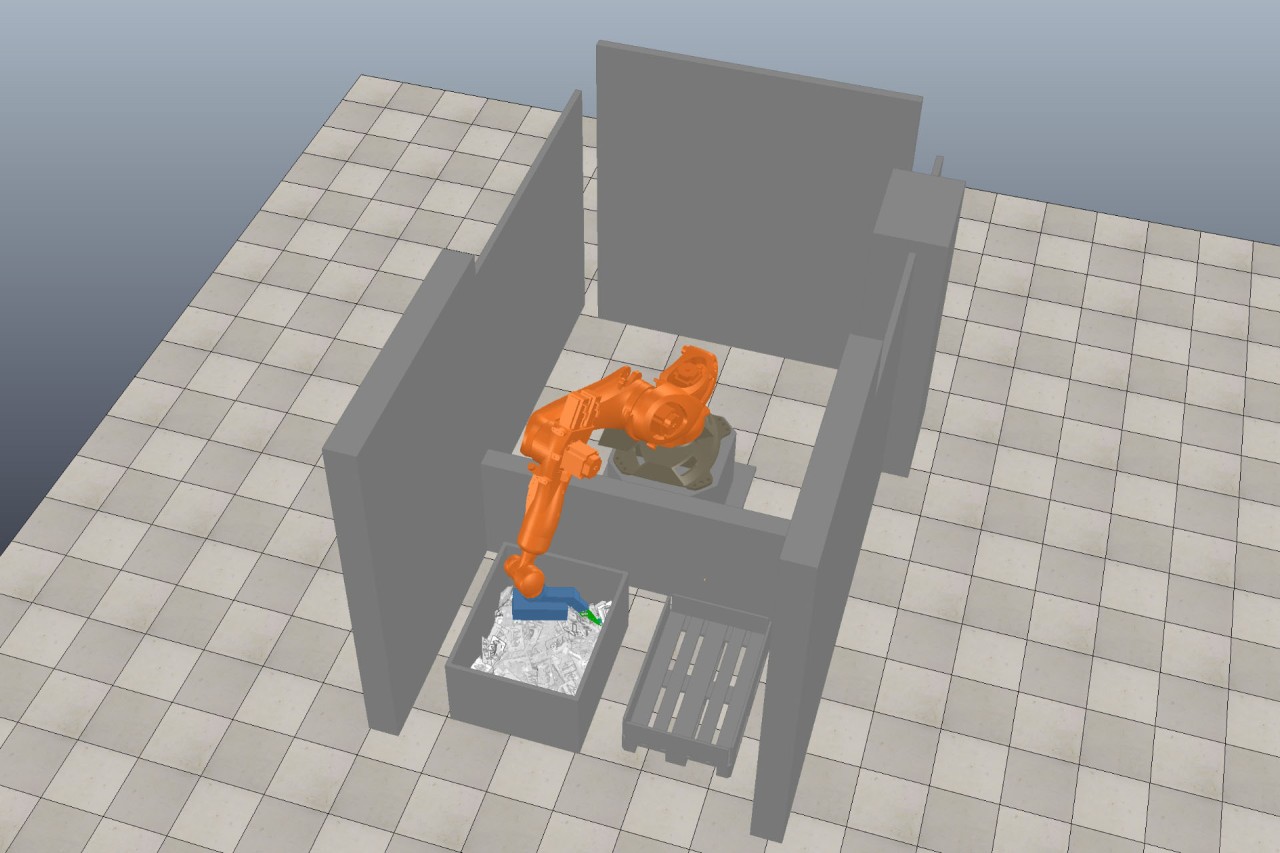
Simulation –
Minimizing risks, perfecting processes

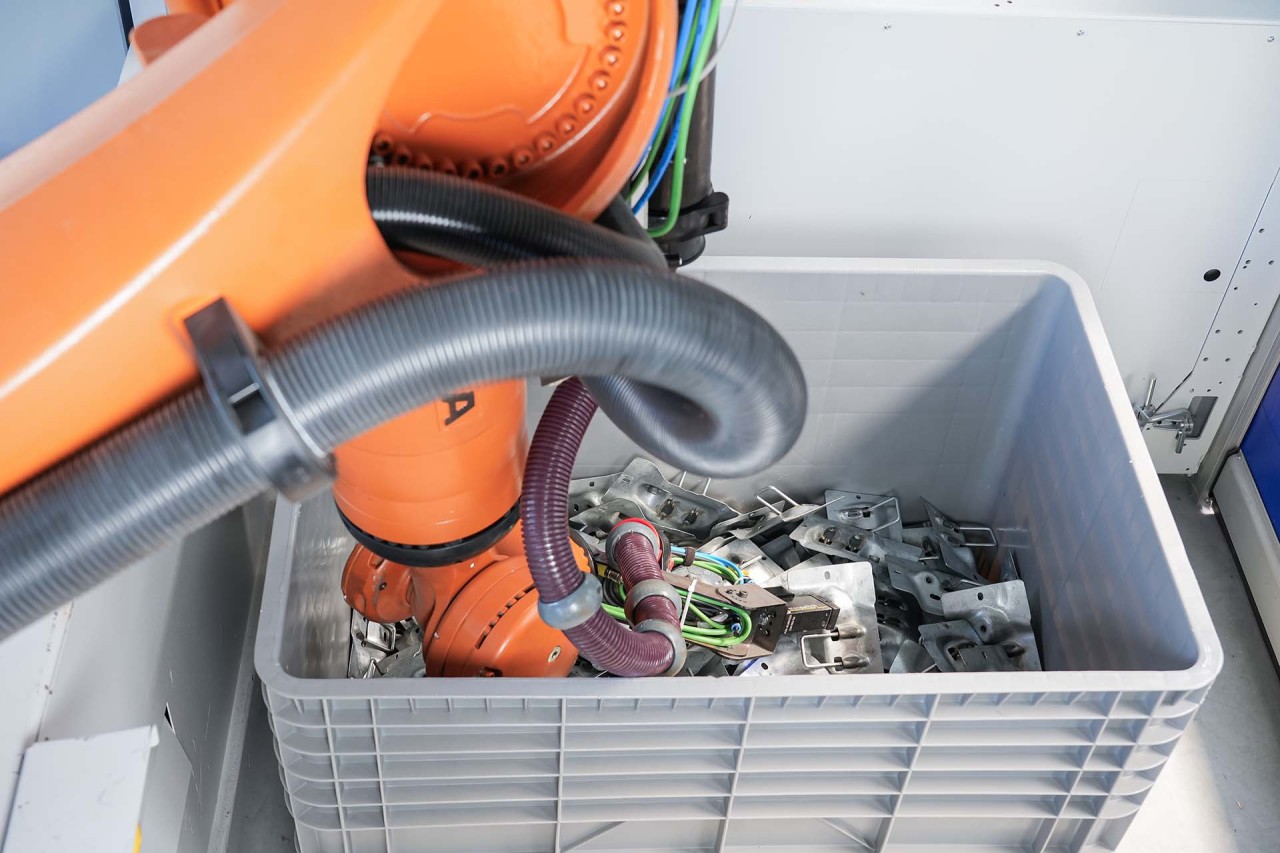
Overlapping function – safe picking, even with closely packed parts
Artificial intelligence (AI) lights up the darkness
From Version 3.4 onwards, AI optimizes the detection parameters automatically.
The operator determines once where the workpieces are located in the point cloud; the software then performs multiple automatic scans and autonomously determines the optimal settings.
Result: More stable, more robust and reproducible detection – without manual fine tuning.
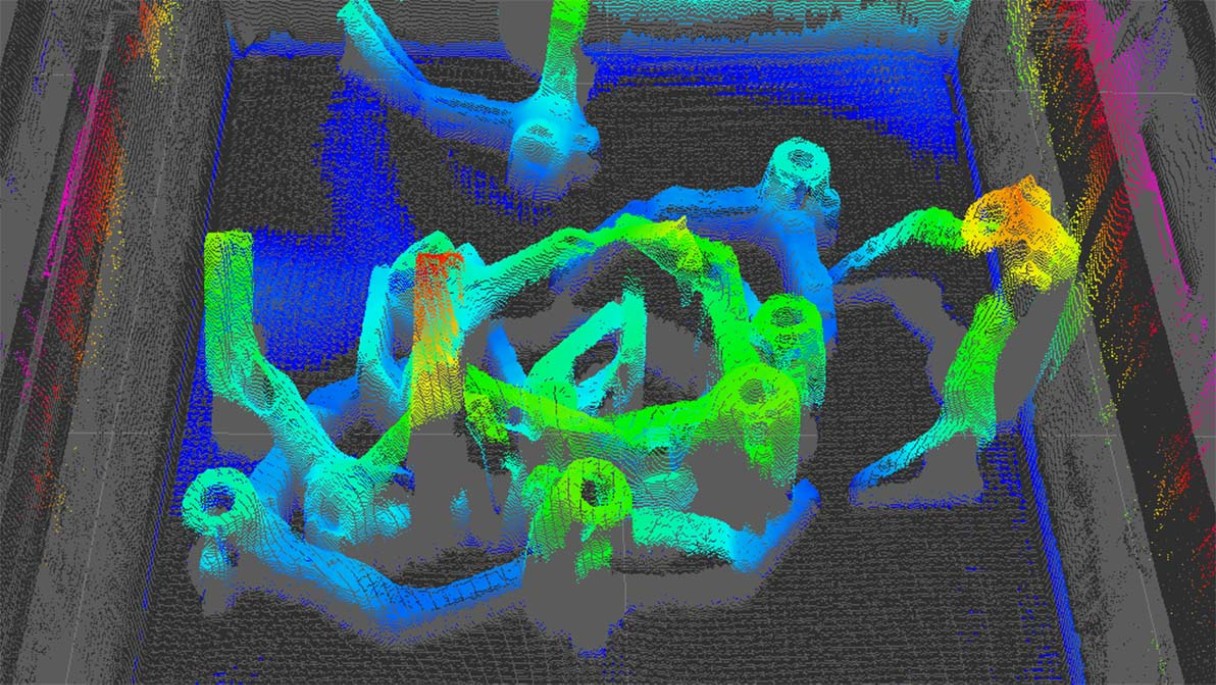
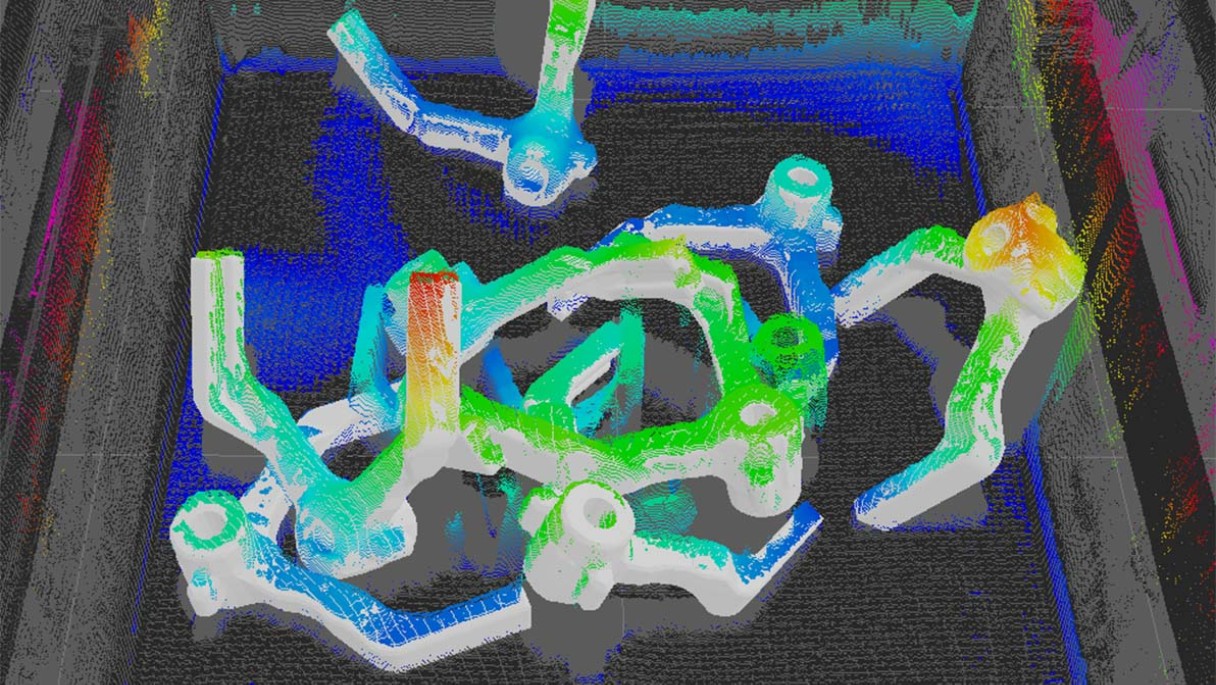
AI-assisted segmentation
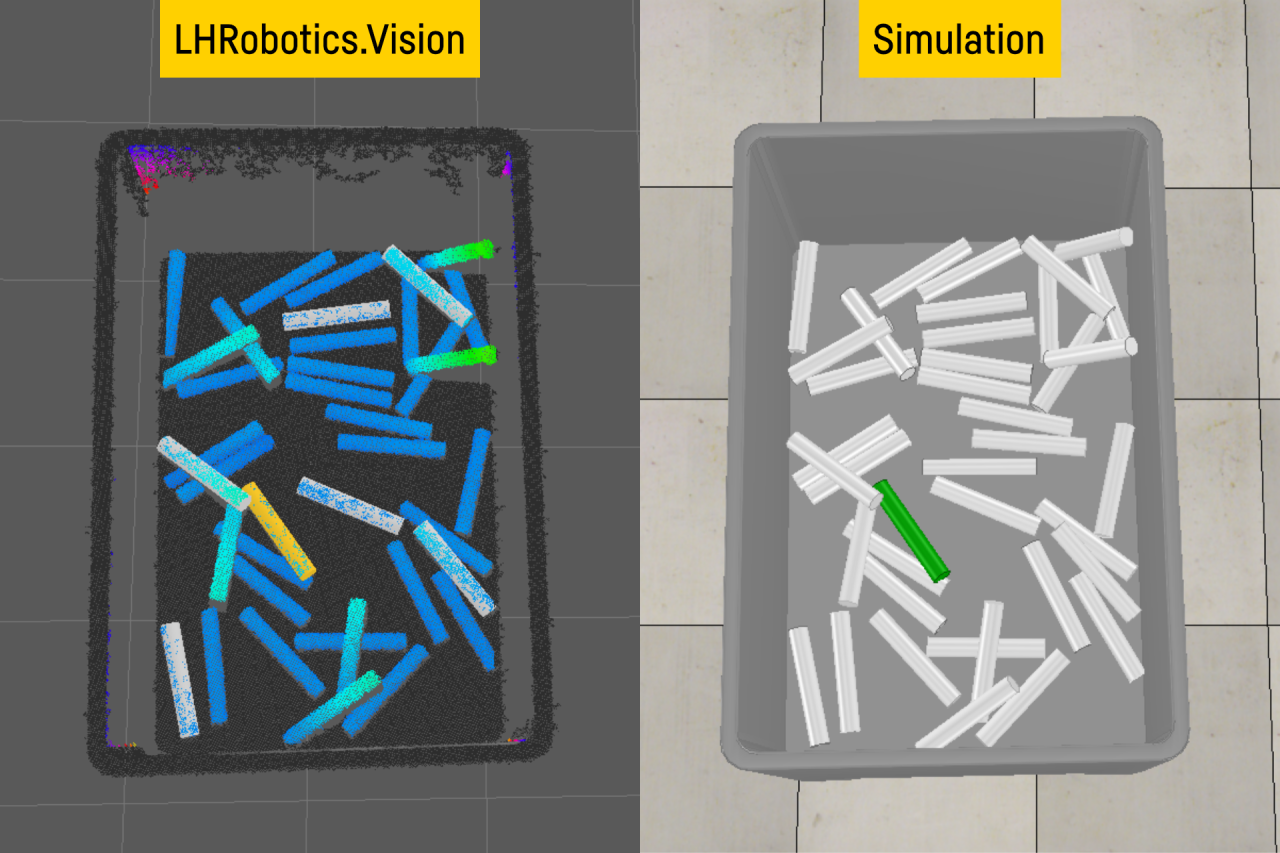
Only see what matters
We process the raw data from each camera and optimize the date with our filters and AI segmentation.
This accelerates our parts matching and receives the best and fastest results

Real situations

Point cloud
Segmented point cloud
Use Cases
Our license models
DETECT
Precise 3D detection – irrespective of camera manufacturer, designed for real world use.
DETECT provides all the core functions for reliable 3D detection of workpieces – irrespective of the camera manufacturer – and thus forms the basis of all other license levels.
- 3D matching of workpieces in a point cloud – compatible with all current 3D camera systems
- The same strong detection performance as in Basic and Pro
- AI supported segmentation for robust part detection – even for narrow workpieces
- Output of precise part coordinates for further processing
- TCP/IP communication interface between software and robot
- Hand/eye calibration between robot and camera
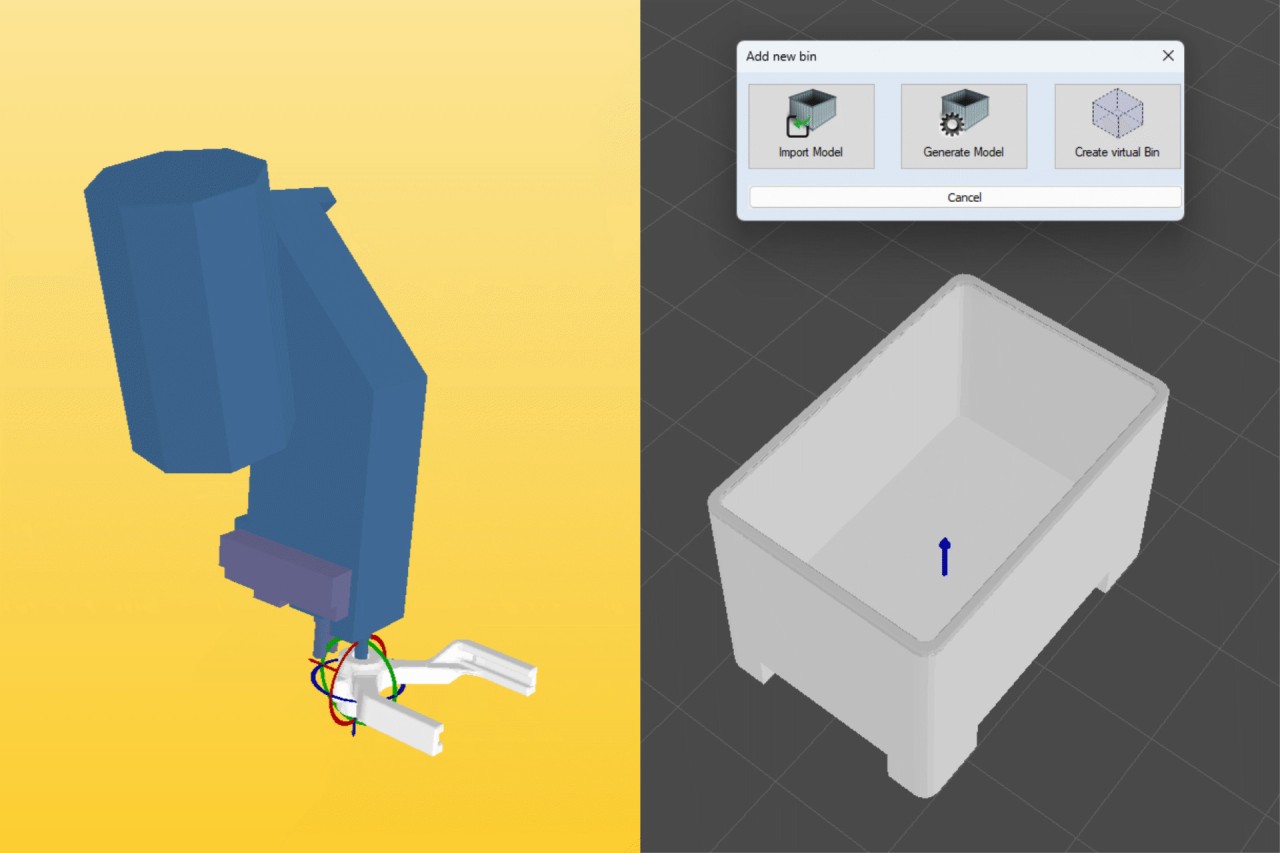
- 3D setup of workpieces and containers (create, import and direct models)
Your tool. Our test. Clear results. Your decision.
Is your workpiece bin picking capable? Let’s find out together – with a free feasibility analysis.
We will test your workpieces under realistic conditions in our Tech Center in Kempten and show you in real time how suited they are to a bin picking solution. If you like, we will meet you personally at the sight and give you direct insights into the technology.
Use our and start your free feasibility analysis.
Liebherr - LHRobotics.Vision - How to achieve bin picking in 4 steps
Brochures download area
Your contact person for robot vision technology packages
We are happy to answer any question you have regarding robot visions applications.
Jürgen Groß
Sales at LHRobotics.Vision
Liebherr-Verzahntechnik GmbH
Kaufbeurer Straße 141
87437 Kempten
Germany
Telephone: +49 831 786 0
Further information on our vision systems
Read exciting articles from our customer magazines as well as press releases





