

Das Technologiepaket
Ein Auge für Details
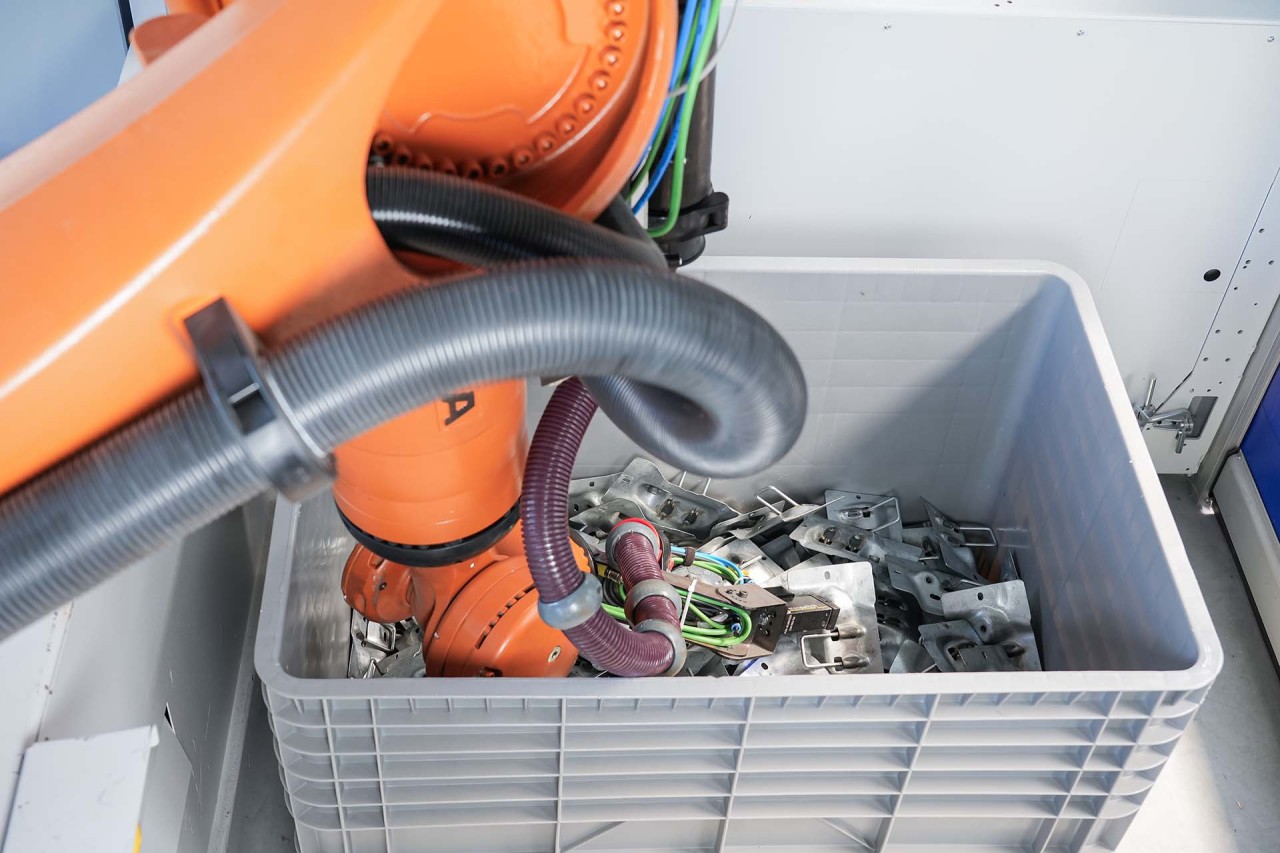
Das Technologiepaket umfasst die LHRobotics.Vision Software für Bin Picking, die eine präzise Objektidentifikation und -selektion sowie eine kollisionsfreie Teileentnahme ermöglicht. Optional kann die Software auch die Roboterbahnplanung bis zum Ablagepunkt übernehmen. Ergänzend wird ein projektorbasiertes Vision-System für die Anwendung benötigt.
Key Features der LHRobotics.Vision Software
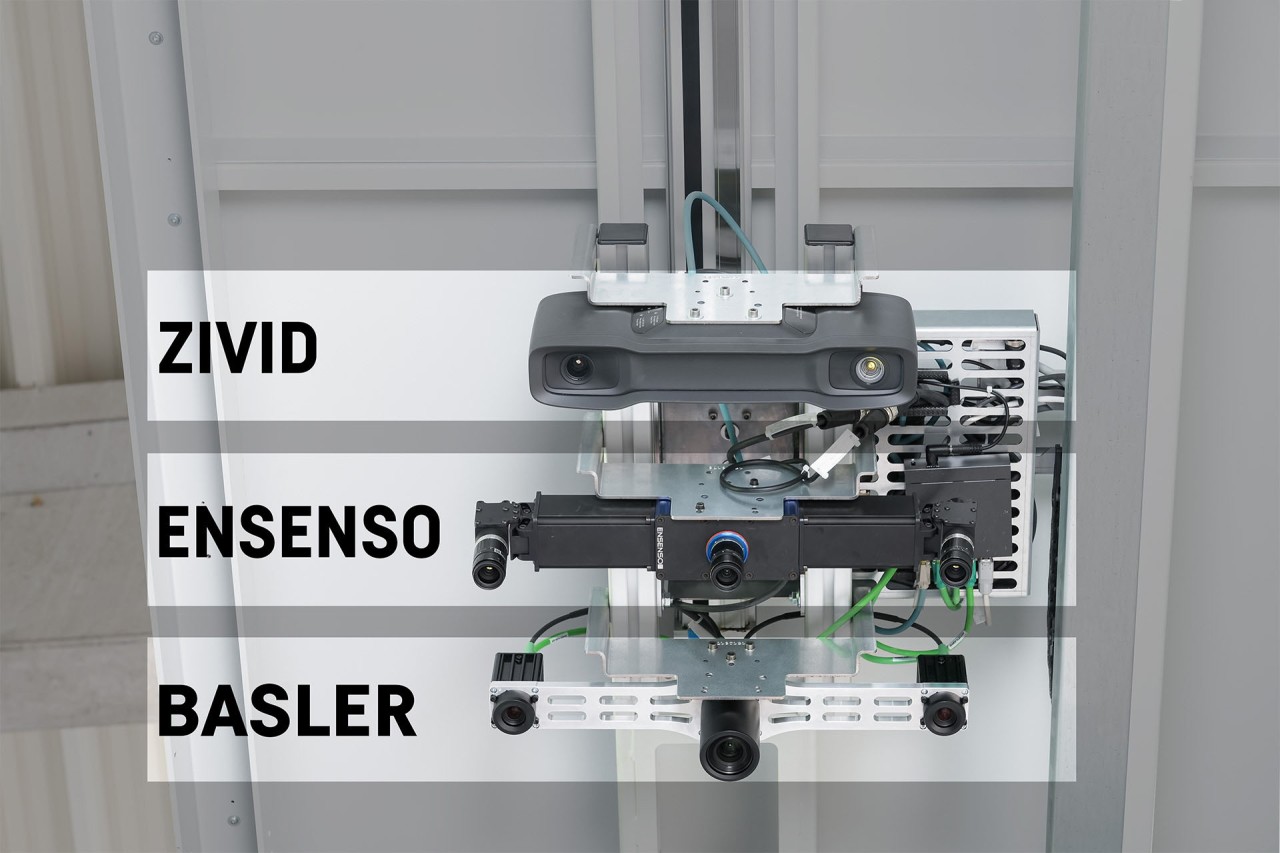
Herstellerunabhängige 3D-Kamera-Integration

Kompetenz aus erster Hand für Bin Picking und 3D-Vision-Lösungen

Breite Roboterunterstützung
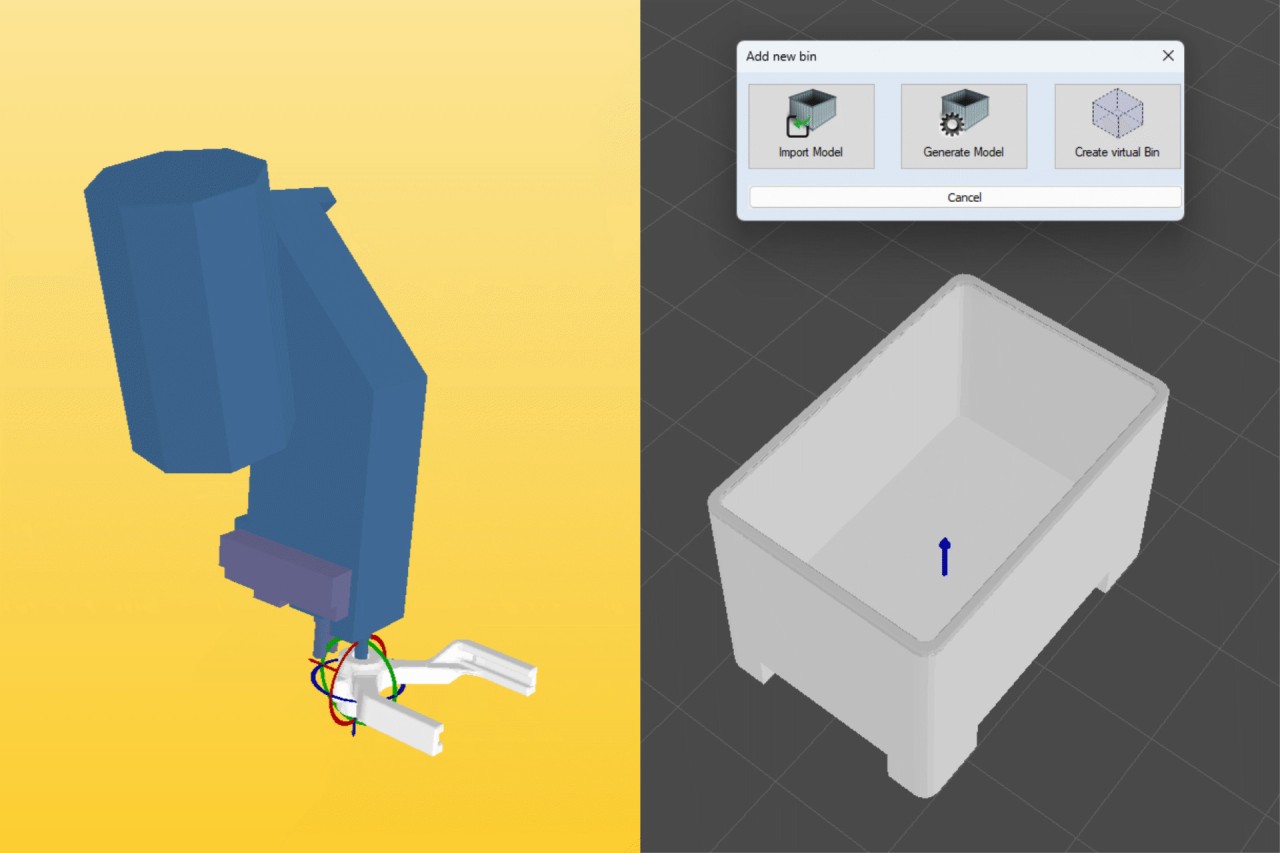
Intuitive Bedienoberfläche für Bin Picking – schneller vom Setup zur Serienproduktion
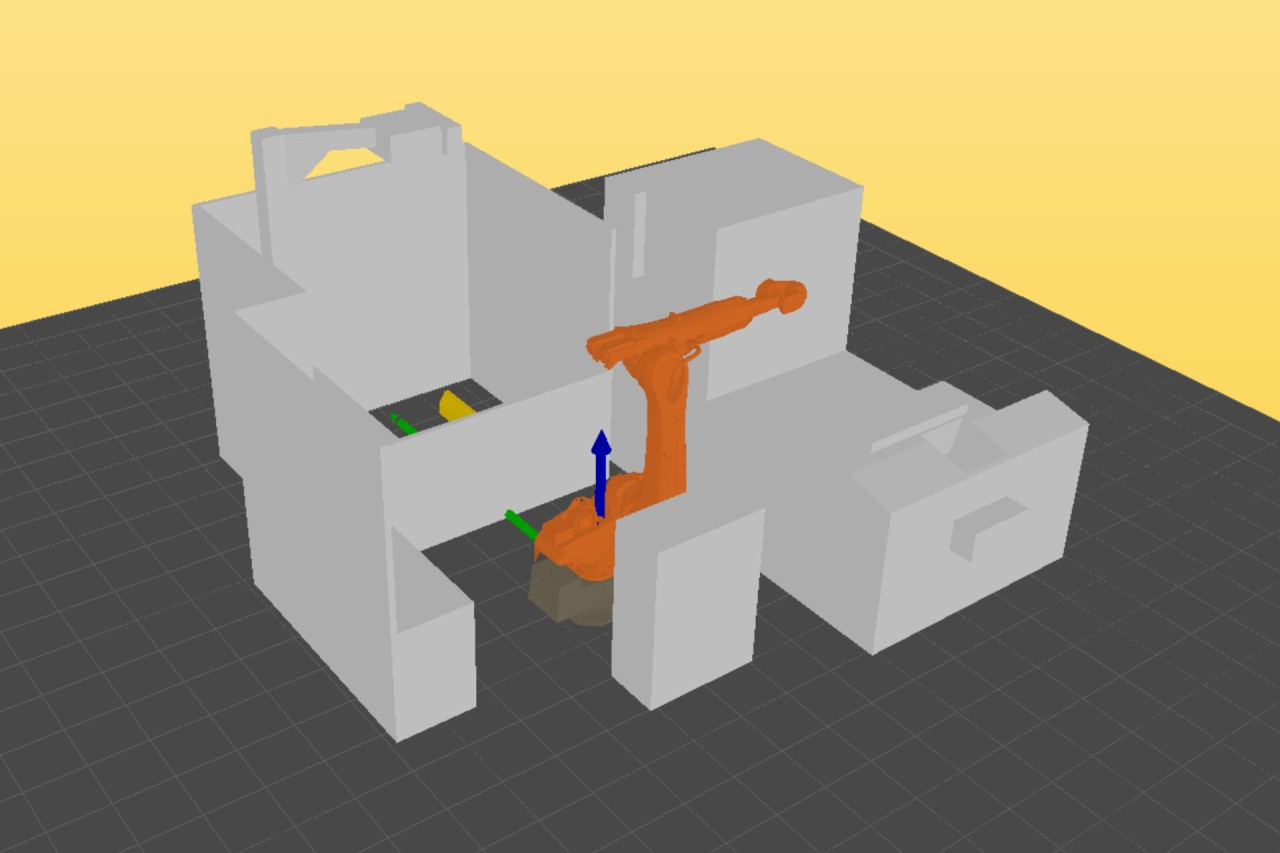
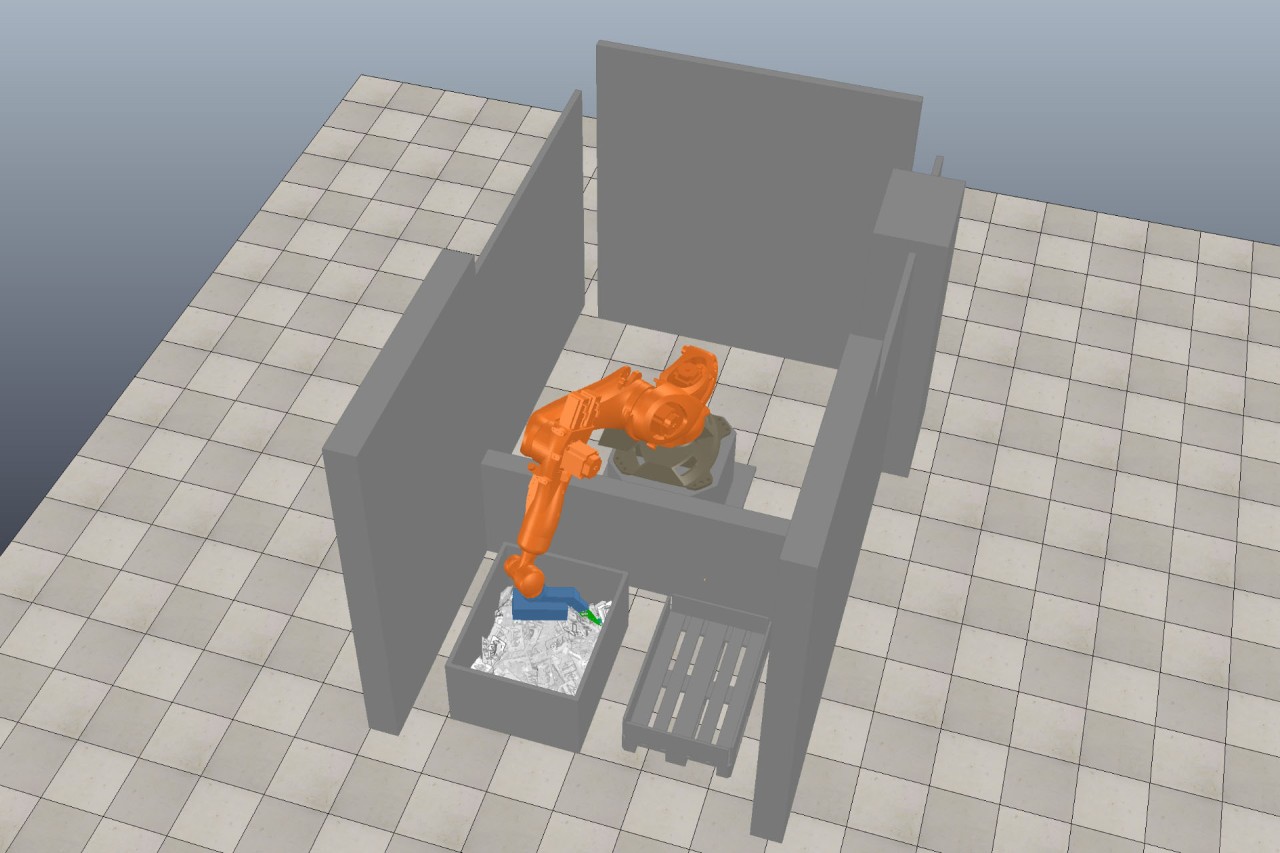
Simulation –
Risiken minimieren, Prozesse perfektionieren
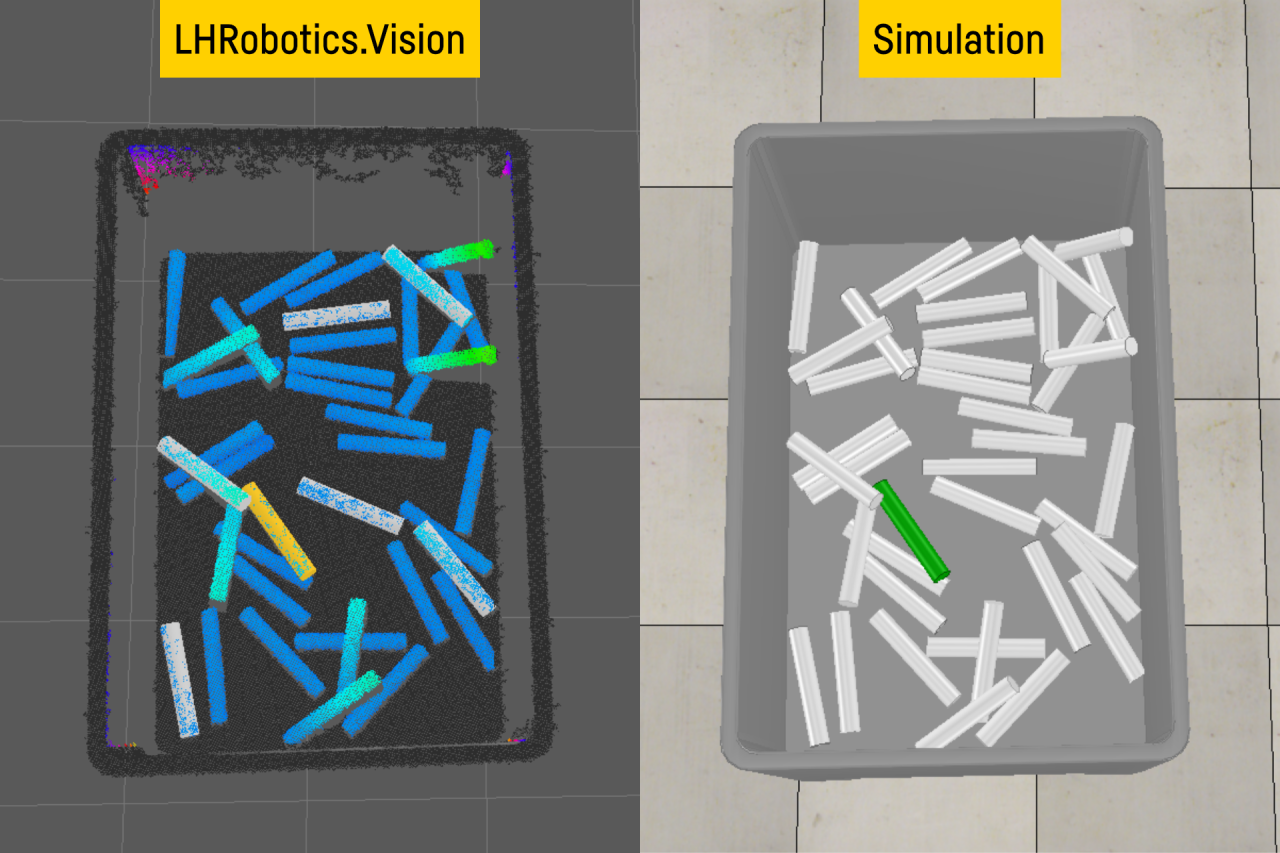

Überlappungsfunktion – sicher greifen, auch bei dicht gepackten Teilen
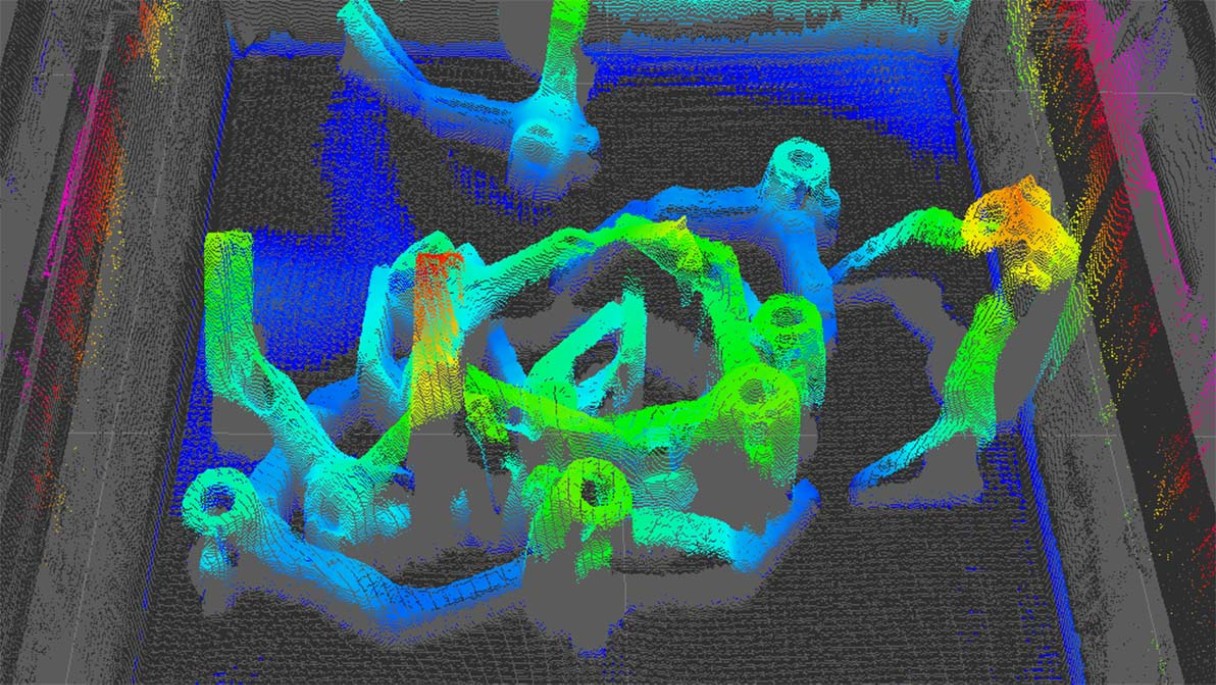
Künstliche Intelligenz (KI) bringt Licht ins Dunkle
Seit Version 3.4 optimiert die KI automatisch die Erkennungsparameter.
Der Bediener legt einmalig fest, wo sich die Werkstücke in der Punktwolke befinden – danach führt die Software mehrere automatische Scans durch und ermittelt selbstständig die optimalen Einstellungen.
Ergebnis: Stabilere, robustere und reproduzierbare Erkennung – ohne manuelles Feintuning.
KI-Segmentierung
Nur das sehen was zählt
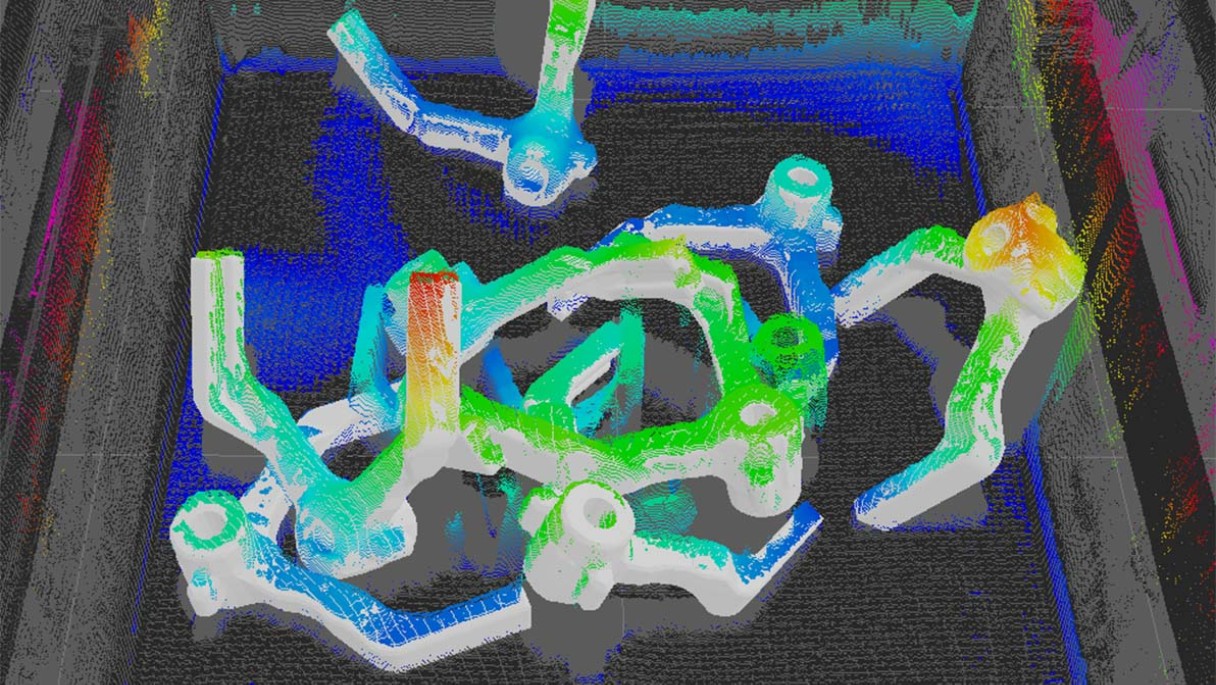
Wir verarbeiten die Rohdaten jeder Kamera und optimieren diese mit unseren Filtern und KI-Segmentierung.
Dadurch beschleunigen wir unser Bauteilmatching und erhalten die besten und schnellsten Ergebnisse

Reale Situation

Punktewolke
Segmentierte Punktewolke
Use Cases
Unsere Lizenzmodelle
DETECT
Präzise 3D‑Erkennung – unabhängig vom Kamerahersteller, gemacht für die Praxis.
DETECT bietet alle Kernfunktionen für die zuverlässige 3D‑Erkennung von Werkstücken – unabhängig vom eingesetzten Kamerahersteller und bildet damit die Basis aller weiteren Lizenzstufen.
- 3D‑Matching von Werkstücken in einer Punktewolke – kompatibel mit allen gängigen 3D‑Kamerasystemen
- Dieselbe starke Erkennungsperformance wie in Basic und Pro
- KI‑gestützte Segmentierung für eine robuste Teileerkennung – selbst bei dünnen Werkstücken
- Ausgabe präziser Bauteilkoordinaten zur Weiterverarbeitung
- TCP/IP‑Kommunikationsschnittstelle zwischen Software und Roboter
- Hand‑Auge‑Kalibrierung zwischen Roboter und Kamera
- 3D‑Einrichtung von Werkstücken und Behältern (Modelle anlegen, importieren, ausrichten)
Ihr Werkstück. Unser Test. Klare Ergebnisse. Ihre Entscheidung.
Ist Ihr Werkstück Bin Picking-fähig? Finden wir es gemeinsam heraus – mit einer kostenlosen Machbarkeitsanalyse.
In unserem Tech-Center in Kempten testen wir Ihre Werkstücke unter realen Bedingungen und zeigen Ihnen live, wie gut sie sich für eine Bin-Picking-Lösung eignen. Auf Wunsch begrüßen wir Sie persönlich vor Ort und geben direkte Einblicke in die Technologie.
Nutzen Sie unser und starten Sie Ihre kostenlose Machbarkeitsanalyse.
Liebherr - LHRobotics.Vision - Wie Sie Bin Picking in 4 Schritten umsetzen
Downloadbereich Prospekte
Ihr Ansprechpartner für die Roboter-Vision Technologiepakete
Wir beantworten gerne Ihre Fragen rund um die Roboter-Vision-Anwendungen.
Jürgen Groß
Vertrieb LHRobotics.Vision
Liebherr-Verzahntechnik GmbH
Kaufbeurer Straße 141
87437 Kempten
Deutschland
Telefon: +49 831 786 0
Weiterführende Informationen zu unseren Vision-Systemen
Lesen Sie spannende Artikel aus unseren Kundenmagazinen sowie Pressemitteilungen





