You are here
Liebherr Group: Products & Services for United Arab Emirates
Other websites for United Arab Emirates

While we still have some way to go to achieve autonomous driving on the road, factories are miles ahead: AGVs (automatic guided vehicles) are already being used in the area of production. They are responsible for intralogistical tasks in production and in doing so transport workpieces from unfinished parts to finished parts between the respective stages of production. But how does the raw material make it into a fully automated production system and how do finished parts make it out of the system?
Since the grippers can be changed flexibly, many options are available to us.
Liebherr-Verzahntechnik GmbH combines driverless transport systems with the tried and tested bin picking concept. Reliable 3D vision systems optically scan the workpiece environment and evaluate it. A robot with patented auxiliary axes can use this information to reliably unload chaotically stored parts from a container with a depth of up to one metre and position them on an AGV. Picking from the box is more complicated the less order there is when the workpieces are delivered, which means that more precision is needed to place them.
Similar rules apply for the production outlet: The robot arm of a pallet cell can pick the machined workpieces from the AGV here as well and then palletise them in workpiece carriers such as wire crates or blisters. “Multilayered storage in crates or blisters during which the robot restacks the crates and blisters in addition to workpiece handling as an intermediate step is also not a problem”, explains Thomas Mattern, Head of Automation System Development. “Since the grippers can be changed flexibly, many options are available to us.”
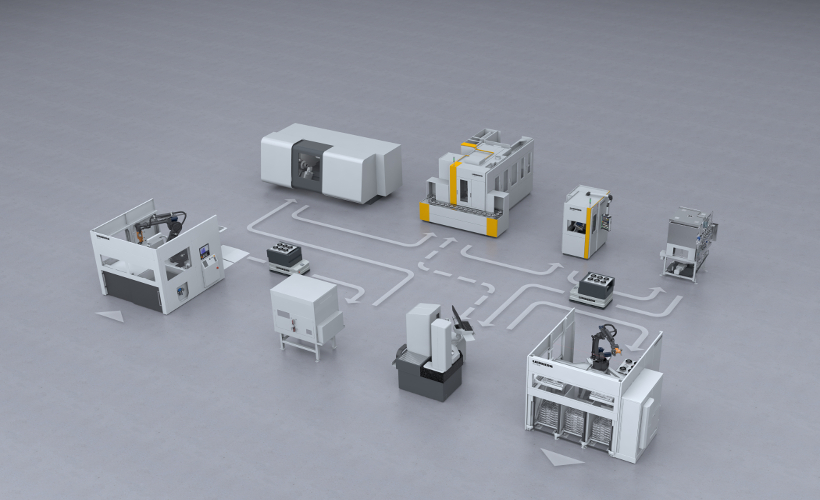
At EMO 2019, Liebherr-Verzahntechnik GmbH shows a possible automation solution for production input and output coupled with an autonomous AGV. “This is the step that has been missing in automation technology: individual production processes are already heavily automated, and now they are connected flexibly to each other.” A system like this can be of great interest for standalone production as well. Thomas Mattern sees a clear necessity for systems such as these: “The more flexible production becomes, the more important intralogistics is. More diverse parts also means more movement in production. Smaller batch sizes have to take different paths in the factory. With our combination of AGVs and bin picking we are addressing a very topical subject here.”


